
Abstract
Brain atlases are considered to be the cornerstone of neuroscience, but most available brain atlases lack fine-grained parcellation results and do not provide information about functionally important connectivity. Recently, novel methodologies and computerized brain mapping techniques could be used to explore the structure, function, and spatio-temporal changes in the human brain. The human Brainnetome Atlas is an in vivo map that includes fine-grained functional brain subregions and detailed anatomical and functional connection patterns for each area. These features should enable researchers to describe the large scale architecture of the human brain more accurately. Using the human Brainnetome Atlas, researchers could simulate and model brain networks using informatics and simulation technologies to elucidate the basic organizing principles of the brain. Others could use this same atlas to design novel neuromorphic systems that are inspired by the architecture of the brain. Therefore, this cutting-edge human Brainnetome Atlas paves the way for constructing an even more fine-grained atlas of the human brain and offers the potential for applications in brain-inspired computing.
Similar content being viewed by others


Keywords
1 Introduction
Over more than a century, tremendous progress has been made in understanding the structure, function, and connection of the human brain at different spatial-temporal scales. However, because of the complexity of the brain, accurately defining the brain regions and mapping their functions and connections are extremely challenging, even on a large scale. Just as modern cartography helped us know planet Earth, the existing brain atlases, based on various mapping techniques, have served as navigators of the human brain and can be considered to be the cornerstone of basic and clinical neuroscience [1–6]. Thus, the long-term goal of mapping the human brain is to understand the organizing principles underlying the architecture of this most complex organ. This understanding will guide us in further exploring how the human brain is organized and how it gives rise to cognitive behaviors. Once we comprehend how the human brain is organized as a network and understand its structures, functions, and connections, computer scientists should be able to begin to mimic the brain as a mathematical network based on its biological substrates.
Currently, however, even on a large scale, no widely accepted criteria exist for partitioning the cortical and subcortical structures. Early parcellation efforts at defining regional boundaries, including the widely-used Brodmann’s maps, only employed postmortem architecture using a limited number of samples [2, 6, 7]. Although the Brodmann’s schematic drawings of the cerebral cortex are still widely used, the limitations of this map have become more and more obvious, increasing the importance of defining brain areas using new methodologies. To resolve the misfit of the Brodmann’s and other earlier brain maps to the human brain, neuroanatomists have developed additional post-mortem brain mapping techniques for brain atlas construction, e.g. combining quantitative cytoarchitectonics with in vitro receptor architectonic analyses of the brain [6]. Although this approach is currently the only technique which can actually map the brain directly, accurate border detection remains subject to unavoidable histological defects [8]. Moreover, systematic cytoarchitectonic mapping procedures are extremely time-consuming and labor-intensive. Although the atlases formed using these techniques have provided invaluable information, the microscale cytoarchitectonic measurements are still insufficient to completely represent brain organization [3, 9].
In addition, in the last two decades information gained using advancing neuroimaging technologies, especially magnetic resonance imaging (MRI), has been extensively used to solve brain parcellation problems. In the early stages, because of the large number of brain regions, a huge amount of inter-subject variation, the complex relationship between regional boundaries, and limits on the spatial resolution of all the neuroimaging methods, the brain atlases based on macro anatomical landmarks or coordinate systems were not valid indicators of regional specialization [5, 10]. Many issues still exist for these atlases, including their roughness, lack of correspondence, shortage of sub-regional information, and variability in the relationships between functional borders and macroscopic landmarks [5, 11]. Recently, exploring brain connectivity via imaging technologies such as diffusion MRI and functional MRI has offered new insights into the functional organization of the human brain and has supplied alternative ways of solving brain parcellation problems. Local areas that have different functions tend to be connected differently to other brain areas. In other words, disparate brain regions maintain their own connectivity profiles [12]. Therefore, the basic idea underlying connectivity-based parcellation is to suppose that all the structural elements belonging to a given brain area share similar connectivity patterns.
The Brainnetome project [4] was launched to investigate the hierarchy in the human brain from genetics to neuronal circuits to behaviors, conceptualizing two components (nodes and connections) as the basic research unit. One of the key elements of this project focuses on optimizing the framework for connectivity-based parcellation with the goal of producing a new human brain atlas, i.e. the human Brainnetome Atlas, which is based on connectional architecture. Moreover, like the detailed information about the long range corticocortical connections in the macaque monkey brain [13, 14], such a new human brain atlas should also represent the detailed structural and functional connections of the human brain at the macro scale. So far, we have employed the above-mentioned strategy to identify 246 regions in the brain and have integrated this data with connectivity analyses and functional characterizations to build the human Brainnetome Atlas. This new brain atlas has the following four features: (A) It establishes a fine-grained brain parcellation scheme for 210 cortical and 36 subcortical regions with a coherent pattern of anatomical connections. (B) It supplies a detailed map of anatomical and functional connections. (C) It decodes brain functions using a meta-analytical approach. And (D) it will be an open resource for researchers to use for analyzing whole brain parcellations, connections, and functions. The human Brainnetome Atlas can be expected to be a major breakthrough among human brain atlases and should provide the basis for new lines of inquiry about the brain organization and functions. It will enable the generation of future brain atlases that are more finely defined and that will advance from single anatomical descriptions to an integrated atlas that includes structure, function, and connectivity along with other potential sources of information. In this paper, we will focus on recent developments in building the human Brainnetome Atlas based on connectional architecture and provide an overview of its potential applications in brain-inspired computing.
2 Human Brainnetome Atlas Based on Connectional Architecture
2.1 The Framework of the Brainnetome Atlas Construction: Connectivity-Based Parcellation
The framework of the Brainnetome Atlas construction primarily consists of the following components (Fig. 1): First, using high resolution structural MRI data, a brain region of interest is defined and extracted from individual participant T1-weighted images. Second, using multimodal MRI data that include diffusion MRI and resting state fMRI data, the anatomical and functional connectivity information is acquired for each voxel in the brain region. Then, the connections between voxels in the brain region and all of the remaining voxels in the brain are estimated and stored. Next, based on the native connectivity matrix, a cross-correlation matrix is calculated to quantify the similarity/dissimilarity between the connectivity profiles of the seed voxels. After this, the cross-correlation matrix is processed using clustering algorithms and reordered a process which can group data on the basis of its similarity to other data. The more similar their connectivity profiles, the more likely it is that the voxels will be grouped together. We then acquire the connectivity-defined clusters and map them back onto the brain. Using this framework, our group is now working on collecting data from different groups of normal populations. We then parcellate the brain regions and finally generate the brain atlas. In the following material, we will further discuss several key methodological issues, including the clustering algorithms, in the framework and show how we determine the optimal number of subregions.

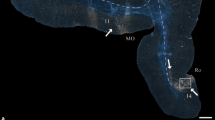
Pipeline of the Connectivity-based Parcellation: Taking the parcellation of human temporal pole using diffusion tensor imaging as an example, A. Defining the boundary of the human temporal pole (TP). B. Mapping the connectional architecture using various MRI modalities, such as anatomical connectivity, resting state functional connectivity and meta-analysis-based co-activation. C. Calculating the similarity/dissimilarity between the connectivity profiles. The TP has been subdivided into sub-regions with distinguishing anatomical connectivity patterns.
First, for the diffusion-weighted imaging tractography-based parcellation studies, unsupervised clustering methods have been introduced to automatically identify different subregions in a specific brain area. Johansen-Berg H et al. (2004) first proposed identifying brain subareas by using a spectral reordering algorithm [15]. Subsequently, other research groups also introduced methods for determining different anatomical connectivity patterns for other brain areas [16]. Several clustering methods, including spectral reordering, K-means, spectral clustering, spectral clustering with edge-weighted centroidal voronoi tessellations, and independent component analysis, have been used to define subregions according to their distinct anatomical connections. Additionally, many clustering methods, such as k-means, spectral clustering, and hierarchical clustering, have been used in connectivity-based parcellations using resting state fMRI data. Of these, spectral clustering, including the normalized cut method [17], is one of the most commonly used clustering methods. Spectral clustering requires a similarity matrix as the input to build a similarity graph and calculates the spectral embedding of the data as a nonlinear dimensionality reduction process [18]. However, the definition of similarity has a huge impact on the final clustering results. One of the most commonly used similarity measures, the Gaussian weighted kernel function, has achieved satisfactory results in many applications, but the scaling parameter is difficult to choose, and it can limit the scalability of the method [19]. Many other similarity methods have been proposed for resting state fMRI-based brain parcellation [20–26]. However, each feature has properties which may bias the parcellation results in different ways. Specifically, cross-correlation calculates the synchronization in the fluctuation between two signals regardless of their magnitudes, but it requires some thresholds or transformations to deal with negative functional connections. A simple transformation of cross-correlation, the functional distance correlation, overcomes the effect of negative elements but puts a greater emphasis on negative than on positive functional connections. One of the most popular distance measures, Euclidean distance, calculates the sum of the square of the differences between two signals in Euclidean space but loses its detection capability for particular features of high dimensional data and is sensitive to scattered outliers. An extension of Euclidean distance, eta2, calculates the differences between two images that have been normalized by their total variances. This improves its sensitivity on particular features, but the user must still deal with the problem of dimensionality in that even small differences can be accumulated into a high level of variability in the boundary detection [16, 27].
Second, determining the appropriate number of subregions is still an open question in machine learning. In the case of connectivity-based parcellation, researchers have attempted to guide the choice of the appropriate number of subregions by estimating the homogeneity, accuracy, reproducibility, or stability of the brain areas [16]. Specifically, researchers performed the clustering analysis repeatedly with different pre-defined number of clusters and chose the appropriate number of subregions based on some indicator. In general, three types of indexes can be used. The first is obtained by using the objective function for the clustering analysis; in this case the number of subregions is automatically decided by optimizing the objective function [28–30]. But this method often provides local extrema rather than a single result and thus can return several parcellation results with similar objective values. In addition, this method is sensitive to the definition of the objective function and to the chosen features. For instance, different ways of calculating the connectivity or different scanning conditions can have a huge impact on the final parcellation results. Thus, the tradeoff between the sensitivity of choosing different cluster numbers and the robustness of the parcellation should be taken into consideration. As an illustration, spectral clustering which has been widely used in image clustering and segmentation, identifies subregions by clustering the eigenvectors of Laplacian matrices derived from the data [18]. Additionally, the number of subregions could also be inferred by the distribution of the eigenvalues [18, 31]. The second type of index is the stability index. Similar to the leave-one-out cross-validation (LOOCV) strategy, a bootstrap-sampling scheme is used to evaluate the consistency of the parcellation between random subgroups [27]. Specifically, the whole group of subjects is randomly split into two sub-groups and the parcellation results from these two subgroups are compared by calculating the similarity scores, including the dice index, normalized mutual information, Rand index, Jaccard similarity coefficient, Hamming distance, and the variation of information distance. This procedure is usually repeated 100 times to achieve a better estimate of the stability of the parcellation. There are also other types of indexes that can be used to calculate reproducibility. For instance, some researchers calculated the similarity index between the similarity graphs rather than calculating the distances between the clusters [25]. In addition, Yeo et al. (2011) trained a k-nearest neighbors (KNN) classifier on one subgroup and predicted the parcellation results on the other group [26]. The agreement between the predicted and actual parcellation results from the second sub-group was estimated as the stability of the clustering of these indexes. In fact, probably because it is easy to implement and independent of the chosen clustering algorithms, the stability index is the most commonly used index for predicting the suitable cluster number. In addition, the power of the clustering process can also be improved by repeatedly performing the clustering using random samples [32–36]. Thus, when forming the human Brainnetome Atlas, we chose this approach as the best method for estimating the most stable parcellation solutions.
2.2 Progress of the Construction of the Human Brainnetome Atlas and Its Main Characteristics
The unique anatomical connectivity of a brain area can not only determine the local function but also define the information processing hierarchies of the area and is, therefore, critical for understanding brain function [12, 37, 38]. Using data from the Human Connectome Project, which was obtained using cutting-edge noninvasive neuroimaging technologies, we employed a connectivity-based parcellation strategy to identify 246 regions in the brain and then integrated these using connectivity analyses to build the human Brainnetome Atlas [39]. To characterize the functional–anatomical organization of the brain, this new atlas addresses two major areas: (A) It establishes a fine-grained brain parcellation scheme (210 cortical regions and 36 subcortical regions maintain a coherent pattern of anatomical connections). (B) It supplies a map of the detailed anatomical and functional connections (Fig. 2).

The human Brainnetome Atlas: A. Parcellation scheme of the human brain in the Brainnetome Atlas. B. Example of the subregional connectogram and of the resting state functional connectivity for areas of the right middle frontal gyrus (MFG) subregion, i.e. A8vl (ventrolateral area 8).
In vivo neuroimaging studies have demonstrated the need for more fine-grained parcellations of large regions of the human brain. The Brainnetome Atlas, based on connectivity architecture, has not only confirmed some of the accepted structural differentiations from earlier cytoarchitectonic maps but has also revealed numerous anatomical subdivisions that had been missed previously. One example is the frontal and temporal polar cortexes, i.e. Brodmann areas 10 and 38, which are typically seen as cytoarchitectonically homogenous areas. However, increasing evidence supports roles in various high order cognitive functions, findings which indicate the potential for subregions in these areas. Using a connectivity-based parcellation based on diffusion MRI data, we found three subregions within the human temporal pole [32], a finding which seems to be consistent with 2 recently published histological works. Specifically, the TGm and TGl in our study correspond approximately to the temporopolar area TG described by Ding SL et al. (2009) [40] and the TPC (with medial and lateral subdivisions TPCm and TPCl) from the study by Blaizot X et al. (2010) [41]. Other examples are in a variety of other complex cytoarchitectonic areas. For example, the posteromedial cortex (PMC) has not yet been clearly mapped and is taken as a single structure in most in vivo neuroimaging studies. In another work from our group, Zhang Y et al. (2014) identified 5 distinct subregions in the human PMC using probabilistic tractography with diffusion tensor imaging [42]. Furthermore, analyses of the anatomical and functional connectivity patterns demonstrated that the dorsal-anterior PMC primarily connects with the sensorimotor system while the dorsal-posterior PMC interacts strongly with vision-related areas. The dorsal-central PMC could be considered to be an association region and the dorsal portion of the ventral PMC may be a transition zone. In addition, the most ventral PMC shows rich connections with the limbic system, suggesting involvement in the default mode network. Parcellating the human PMC at a subtler level could improve our understanding of its functions. Therefore, the more fine-grained parcellation results and connectivity patterns in the next-generation brain atlas could lead to an entirely new understanding of how the brain works as well as shedding light on the pathophysiological mechanisms of psychiatric and neurological disorders.
Theories about brain functions in humans have been informed by neuroanatomical studies of brain regions obtained in animal tract-tracing studies, but understanding how these elucidate the connectivity of brain areas in humans is limited. This is a major function of the Brainnetome Atlas. Combining diffusion magnetic resonance imaging with tractography could enable researchers to reconstruct the major fiber bundles; while functional connectivity analysis of functional magnetic resonance images could also provide a noninvasive means of assessing in vivo the large-scale connectivity in the brain. Such approaches can relate connectivity data to a particular parcellation scheme, a relationship which can be useful for detailed investigations of a particular subsystem. Existing brain atlases were not intended to be connectivity maps, so this type of data has not previously been made available in a whole human brain atlas. Different connectivity fingerprints will be presented throughout the Brainnetome Atlas. Take the subregions of the human temporal pole as an example. Because little is known about the connectivity and function of the human TP, it has been referred to as “the enigmatic TP”. Based on a connectivity-based parcellation using diffusion tensor imaging, three distinct subregions with characteristic fiber pathways, the dorsal (TAr), the medial (TGm), and lateral (TGl) subregions, which are located ventrally, were identified. The connectivity patterns showed a dorsal/ventral sensory segregation of auditory and visual processing and olfactory processing involvement in the medial TGm. By combining these results with a complementary resting-state functional connectivity analysis, we were able to observe connections of the TGm with the orbitofrontal cortex and other emotion-related areas, connections of the TGl with the medial prefrontal cortex and major default mode network regions, and connections of the TAr with the perisylvian language areas [32].
2.3 Potential Applications of the Brainnetome Atlas in Brain-Inspired Computing
The first goal of the Brainnetome project is to identify brain networks, from the finest scale to the most macroscopic one, and to explore the relationships between them using multimodal neuroimaging techniques. The Brainnetome Atlas will combine brain connectivity with cytoarchitecture and integrate other information. This will provide much more information than is available in existing brain atlases. Second, the project will study the dynamics and characteristics of brain networks throughout development, during aging, and in connection with evolutionary processes and investigate how the brain networks mediate human behavioral variability. With such a comprehensive understanding of the biological substrate of brain networks, on one hand, we should be able to create models to explore how brain networks are organized and how they give rise to behavior and cognition. On the other hand, we could design completely new hardware or algorithms for computing systems that are inspired by the brain’s architecture. Because the current Brainnetome Atlas provides more complete information about the macroscale brain network by associating individual nodes with their distinct connectivity patterns and with their functional profiles, this new atlas could serve as a backbone for brain-based cognitive modeling and brain-inspired computer chips. In the following paragraphs we discuss in more detail how the Brainnetome Atlas can be used for these purposes.
From a computational point of view, the Brainnetome Atlas provides new insights into how the brain can be conceptualized as being constructed of a collection of interacting modules, with each of the modules having a specific and perhaps unique role in a complex sequence of information processing, with cognition and intelligent behavior emerging at the level of modular interaction. The advantage of building a complex system using modules has long been known by computer scientists [43]. First, a modular structure simplifies the design of a complex system by factoring any difficult task into a number of relatively easy sub-tasks; therefore each of the tasks can be accomplished within a less complex sub-system (module). Second, such a structure allows improvements to be made gradually. To endow the system with new functionality, one module can simply be modified or added while keeping the other parts unchanged. Accordingly, if a design error is spotted in the system, it can be isolated and fixed locally within its module, without the need to search for the solution across the entire system. Third, since different problems may contain the same sub-problems, a modular system can be compact because standard modules can be utilized to solve those sub-problems and can achieve versatility simply by dynamically organizing different modules for different tasks at hand.
In addition to those functional advantages, if we look from an evolutionary perspective, it is not difficult to understand why the brain is organized this way, as evolution can only improve the system a little bit at a time, and such improvement has to be built upon what has already been accomplished. In other words, any improvement has to be incremental, rather than dramatically changing the parts that have been working. Indeed, the modular nature has been suggested as the central designing principle of the human cognitive architecture [44]. Consequently, if we are interested in building artificial systems that are inspired by the brain, it is vital to learn how various cognitive tasks can be factored into small parts, with each one processed by a relatively simple part, and how the information is routed across all these parts, thereby “binding” the distributed processing into a coherent one. Simply put, this is what the Brainnetome Atlas can tell us. Its detailed parcellation can be used to identify the number of modules utilized by the brain, and the connection map between individual brain regions or sub-regions provides a parsimonious way to describe the information flow throughout the entire system. Arguably, what we can learn from this modular structure may be one of the most important inspirations that the brain can offer for designing an intelligent system, because it reflects the condensed knowledge accumulated during evolution about the structure of the world, as well as how one can exploit such a structure in order to survive.
A recent example of using a brain-like modular structure to achieve various interesting behaviors is a system named Spaun, produced by researchers at the University of Waterloo, Canada [45]. Spaun consists of 2.5 million artificial neurons, which are organized into various modules that mimic a number of cortical and subcortical structures. The input to the system is numbers and characters displayed on 28 by 28 images. Through a series of hierarchical visual processing stages that are similar to the ventral stream in primate brains, Spaun recognizes the symbols on the display and uses them to guide a robotic arm to write down its response. Depending on the content of the input, the proper responses range from simply copying what is on the input image to carrying out logistic reasoning. The choice of proper action is primarily controlled by a module similar to a subcortical structure- the thalamus. Additionally, Spaun’s “cognition” is supported by a “working memory” function achieved in a module similar to the prefrontal cortex. Once the proper action is decided, the execution is carried out by first planning the appropriate sequence of movements of a robotic arm in a module similar to the premotor areas in the brain, followed by translating this planning into detailed movement commands in a module similar to the primary motor area. Finally, the commands are routed to the robotic arm to guide the behavior. With the aid of this brain-like modularity, Spaun is able to perform 8 different tasks, all with the same initial configuration, demonstrating the power of versatility by factoring different tasks into standard sub-tasks (e.g., vision, choice of action, working memory, motion, etc.) and preparing individual modules to deal with them separately.
Clearly, Spaun exploits a very rough structure reflecting the brain’s modularity, with the entire system being parcellated into only a dozen or so modules. Now, with the Brainnetome Atlas, we can obtain a much more detailed view of this modularity, and we can reasonably expect that a much higher level of versatility can be achieved if this knowledge can be put into use in future system designs. Clearly, a notable piece of information that is currently missing is the functionality of individual sub-regions in the atlas. To add this will be necessary to fully harness the power of the brain’s modularity structure for artificial intelligence (AI). This would be one of the primary goals in the further development of the Brainnetome Atlas. Ideally, the functionality can first be elucidated in a number of sub-systems that are most relevant for AI, such as memory processing [36], language processing [46], and decision making [47]. Identifying these essential sub-systems should lead to better ways of factoring difficult problems into sub-problems and enable deeper understanding and, eventually, better performance.
Furthermore, the Brainnetome Atlas will give us a reference framework to unite computer science and neuroscience and reveal potential applications that will help in designing and building the next generation of computing systems. Because cognitive modeling grows from hundreds of neurons, to the mouse brain scale, to the rat brain scale, and finally to the human brain scale, the same hierarchical organization of the brain could be used. Based on insights provided by the brain’s architecture at difference scales, researchers can start to design neuromorphic chips that mimic the brain’s connectivity. For example, TrueNorth is a neuromorphic chip produced by IBM [48]. The architectural design of TrueNorth was inspired by findings from neuroscience. For example, the neurosynaptic core was inspired by the canonical cortical microcircuit, the network of the neurosynaptic cores was inspired by the two-dimensional sheet of the cerebral cortex, and the multichip network was inspired by the white-matter graph in the macaque monkey brain [49]. To facilitate future investigations of the human brain and to fulfill the requirements of brain-inspired computing, the Brainnetome Atlas, accompanied by related software, will be made freely available for download via http://atlas.brainnetome.org, along with the subregional structural and functional connections.
3 Conclusions
The quest for next generation information and communication technology requires new breakthroughs in brain-inspired computing, which involves a massive set of interconnections that include entirely new computing architectures, system designs, and programming paradigms [48, 50]. Brain-inspired design depends on possessing much more concrete information about the brain. Therefore, we need to understand a lot more about the brain, such as how it is organized and how the basic units in the human brain are structured, to mimic the brain as accurately as possible. The human brain is not only the probably most complex biological structure but also a highly topographically organized organ. Currently, many approaches parcellating the brain into areas with different criteria became available, but there is still no definitive map of the human brain [51, 52]. Therefore, the goal of the future brain map for the Brainnetome project, i.e. the Brainnetome Atlas, is to understand the organizing principles underlying the anatomy of the brain. At this stage, the Brainnetome Atlas utilizes in vivo data, has fine-grained subregions, and reveals detailed anatomical and functional connection patterns for each region. The next stage of the Brainnetome Atlas will be multimodal in rather than unimodal and dynamic rather than static by including other brain mapping information, such as genetic expression patterns and dynamic spatiotemporal changes during normal development and in the aging process or in different disease states. Furthermore, in order to complete such brain maps across different scales, collaborations between brain research institutes in different fields, such as laboratories that employ brain tissue clearing techniques [53] and micro-imaging methods [54] to map the nervous system at the micro scale, will be necessary for establishing the next generation Brainnetome Atlas.
References
Sporns, O.: Cerebral cartography and connectomics. Philos. Trans. Roy. Soc. Lond. B Biol. Sci. 370 (2015). doi:10.1098/rstb.2014.0173
Amunts, K., Zilles, K.: Architectonic mapping of the human brain beyond brodmann. Neuron 88, 1086–1107 (2015)
Van Essen, D.C.: Cartography and connectomes. Neuron 80, 775–790 (2013)
Jiang, T.: Brainnetome: a new -ome to understand the brain and its disorders. Neuroimage 80, 263–272 (2013)
Evans, A.C., Janke, A.L., Collins, D.L., Baillet, S.: Brain templates and atlases. Neuroimage 62, 911–922 (2012)
Zilles, K., Amunts, K.: Centenary of Brodmann’s map–conception and fate. Nat. Rev. Neurosci. 11, 139–145 (2010)
Brodmann, K.: Vergleichende Lokalisationslehre der Großhirnrinde in ihren Prinzipien dargestellt auf Grund des Zellenbaues. Verlag von Johann Ambrosius Barth, Leipzig (Germany) (1909)
Amunts, K., Lepage, C., Borgeat, L., Mohlberg, H., Dickscheid, T., Rousseau, M.E., Bludau, S., Bazin, P.L., Lewis, L.B., Oros-Peusquens, A.M., Shah, N.J., Lippert, T., Zilles, K., Evans, A.C.: BigBrain: an ultrahigh-resolution 3D human brain model. Science 340, 1472–1475 (2013)
Kaas, J.H.: The organization of neocortex in mammals: implications for theories of brain function. Annu. Rev. Psychol. 38, 129–151 (1987)
Van Essen, D.C.: A Population-Average, Landmark- and Surface-based (PALS) atlas of human cerebral cortex. Neuroimage 28, 635–662 (2005)
Bohland, J.W., Bokil, H., Allen, C.B., Mitra, P.P.: The brain atlas concordance problem: quantitative comparison of anatomical parcellations. PLoS ONE 4, e7200 (2009)
Passingham, R.E., Stephan, K.E., Kotter, R.: The anatomical basis of functional localization in the cortex. Nat. Rev. Neurosci. 3, 606–616 (2002)
Markov, N.T., Ercsey-Ravasz, M.M.: Ribeiro Gomes, A.R., Lamy, C., Magrou, L., Vezoli, J., Misery, P., Falchier, A., Quilodran, R., Gariel, M.A., Sallet, J., Gamanut, R., Huissoud, C., Clavagnier, S., Giroud, P., Sappey-Marinier, D., Barone, P., Dehay, C., Toroczkai, Z., Knoblauch, K., Van Essen, D.C., Kennedy, H.: A weighted and directed interareal connectivity matrix for macaque cerebral cortex. Cereb. Cortex 24, 17–36 (2014)
Dyhrfjeld-Johnsen, J., Maier, J., Schubert, D., Staiger, J., Luhmann, H.J., Stephan, K.E., Kotter, R.: CoCoDat: a database system for organizing and selecting quantitative data on single neurons and neuronal microcircuitry. J. Neurosci. Methods 141, 291–308 (2005)
Johansen-Berg, H., Behrens, T.E., Robson, M.D., Drobnjak, I., Rushworth, M.F., Brady, J.M., Smith, S.M., Higham, D.J., Matthews, P.M.: Changes in connectivity profiles define functionally distinct regions in human medial frontal cortex. Proc. Natl. Acad. Sci. USA 101, 13335–13340 (2004)
Eickhoff, S.B., Thirion, B., Varoquaux, G., Bzdok, D.: Connectivity-based parcellation: critique and implications. Hum. Brain Mapp. 36(12), 4771–4792 (2015)
Yu, S.X., Shi, J.: Multiclass spectral clustering. In: Ninth IEEE International Conference on Computer Vision, 2003. Proceedings, vol. 1, pp. 313–319 (2003)
von Luxburg, U.: A tutorial on spectral clustering. Stat. Comput. 17, 395–416 (2007)
Perona, P., Zelnik-Manor, L.: Self-tuning spectral clustering. Adv. Neural Inf. Process. Syst. 17, 1601–1608 (2004)
Cohen, A.L., Fair, D.A., Dosenbach, N.U., Miezin, F.M., Dierker, D., Van Essen, D.C., Schlaggar, B.L., Petersen, S.E.: Defining functional areas in individual human brains using resting functional connectivity MRI. Neuroimage 41, 45–57 (2008)
Kelly, C., Toro, R., Di Martino, A., Cox, C.L., Bellec, P., Castellanos, F.X., Milham, M.P.: A convergent functional architecture of the insula emerges across imaging modalities. Neuroimage 61, 1129–1142 (2012)
Chang, L.J., Yarkoni, T., Khaw, M.W., Sanfey, A.G.: Decoding the role of the insula in human cognition: functional parcellation and large-scale reverse inference. Cereb. Cortex 23(2), 739–749 (2012)
Kim, J.H., Lee, J.M., Jo, H.J., Kim, S.H., Lee, J.H., Kim, S.T., Seo, S.W., Cox, R.W., Na, D.L., Kim, S.I., Saad, Z.S.: Defining functional SMA and pre-SMA subregions in human MFC using resting state fMRI: functional connectivity-based parcellation method. Neuroimage 49, 2375–2386 (2010)
Nelson, S.M., Cohen, A.L., Power, J.D., Wig, G.S., Miezin, F.M., Wheeler, M.E., Velanova, K., Donaldson, D.I., Phillips, J.S., Schlaggar, B.L., Petersen, S.E.: A parcellation scheme for human left lateral parietal cortex. Neuron 67, 156–170 (2010)
Craddock, R.C., James, G.A., Holtzheimer 3rd, P.E., Hu, X.P., Mayberg, H.S.: A whole brain fMRI atlas generated via spatially constrained spectral clustering. Hum. Brain Mapp. 33, 1914–1928 (2012)
Yeo, B.T., Krienen, F.M., Sepulcre, J., Sabuncu, M.R., Lashkari, D., Hollinshead, M., Roffman, J.L., Smoller, J.W., Zollei, L., Polimeni, J.R., Fischl, B., Liu, H., Buckner, R.L.: The organization of the human cerebral cortex estimated by intrinsic functional connectivity. J. Neurophysiol. 106, 1125–1165 (2011)
Zhang, Y., Caspers, S., Fan, L., Fan, Y., Song, M., Liu, C., Mo, Y., Roski, C., Eickhoff, S., Amunts, K., Jiang, T.: Robust brain parcellation using sparse representation on resting-state fMRI. Brain Struct. Funct. 220, 3565–3579 (2015)
Mishra, A., Rogers, B.P., Chen, L.M., Gore, J.C.: Functional connectivity-based parcellation of amygdala using self-organized mapping: a data driven approach. Hum. Brain Mapp. 35, 1247–1260 (2014)
Wig, G.S., Laumann, T.O., Cohen, A.L., Power, J.D., Nelson, S.M., Glasser, M.F., Miezin, F.M., Snyder, A.Z., Schlaggar, B.L., Petersen, S.E.: Parcellating an individual subject’s cortical and subcortical brain structures using snowball sampling of resting-state correlations. Cereb. Cortex 24, 2036–2054 (2014)
Ryali, S., Chen, T., Supekar, K., Menon, V.: A parcellation scheme based on von Mises-Fisher distributions and Markov random fields for segmenting brain regions using resting-state fMRI. Neuroimage 65, 83–96 (2013)
Azran, A., Ghahramani, Z.: Spectral methods for automatic multiscale data clustering. In: Proceeding of 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, vol. 1, pp. 190–197 (2006)
Fan, L., Wang, J., Zhang, Y., Han, W., Yu, C., Jiang, T.: Connectivity-based parcellation of the human temporal pole using diffusion tensor imaging. Cereb. Cortex 24, 3365–3378 (2014)
Liu, H., Qin, W., Li, W., Fan, L., Wang, J., Jiang, T., Yu, C.: Connectivity-based parcellation of the human frontal pole with diffusion tensor imaging. J. Neurosci. 33, 6782–6790 (2013)
Beckmann, M., Johansen-Berg, H., Rushworth, M.F.: Connectivity-based parcellation of human cingulate cortex and its relation to functional specialization. J. Neurosci. 29, 1175–1190 (2009)
Neubert, F.X., Mars, R.B., Thomas, A.G., Sallet, J., Rushworth, M.F.: Comparison of human ventral frontal cortex areas for cognitive control and language with areas in monkey frontal cortex. Neuron 81, 700–713 (2014)
Zhuo, J., Fan, L., Liu, Y., Zhang, Y., Yu, C., Jiang, T.: Connectivity profiles reveal a transition subarea in the parahippocampal region that integrates the anterior temporal-posterior medial systems. J. Neurosci. 36, 2782–2795 (2016)
Felleman, D.J., Van Essen, D.C.: Distributed hierarchical processing in the primate cerebral cortex. Cereb. Cortex 1, 1–47 (1991)
Jbabdi, S., Sotiropoulos, S.N., Haber, S.N., Van Essen, D.C., Behrens, T.E.: Measuring macroscopic brain connections in vivo. Nat. Neurosci. 18, 1546–1555 (2015)
Fan, L., Li, H., Zhuo, J., Zhang, Y., Wang, J., Chen, L., Yang, Z., Chu, C., Xie, S., Laird, A.R., Fox, P.T., Eickhoff, S.B., Yu, C., Jiang, T.: The human brainnetome atlas: a new brain atlas based on connectional architecture. Cereb. Cortex 26, 3508–3526 (2016)
Ding, S.L., Van Hoesen, G.W., Cassell, M.D., Poremba, A.: Parcellation of human temporal polar cortex: a combined analysis of multiple cytoarchitectonic, chemoarchitectonic, and pathological markers. J. Comp. Neurol. 514, 595–623 (2009)
Blaizot, X., Mansilla, F., Insausti, A.M., Constans, J.M., Salinas-Alaman, A., Pro-Sistiaga, P., Mohedano-Moriano, A., Insausti, R.: The human parahippocampal region: I. temporal pole cytoarchitectonic and MRI correlation. Cereb. Cortex 20, 2198–2212 (2010)
Zhang, Y., Fan, L., Zhang, Y., Wang, J., Zhu, M., Zhang, Y., Yu, C., Jiang, T.: Connectivity-based parcellation of the human posteromedial cortex. Cereb. Cortex 24, 719–727 (2014)
Baum, E.B.: What is Thought? MIT Press, Cambridge (2004)
Fodor, J.A.: The Modularity of Mind. MIT Press, Cambridge (1983)
Eliasmith, C., Stewart, T.C., Choo, X., Bekolay, T., DeWolf, T., Tang, Y., Rasmussen, D.: A large-scale model of the functioning brain. Science 338, 1202–1205 (2012)
Wang, J., Fan, L., Wang, Y., Xu, W., Jiang, T., Fox, P.T., Eickhoff, S.B., Yu, C., Jiang, T.: Determination of the posterior boundary of Wernicke’s area based on multimodal connectivity profiles. Hum. Brain Mapp. 36, 1908–1924 (2015)
Liu, H., Qin, W., Qi, H., Jiang, T., Yu, C.: Parcellation of the human orbitofrontal cortex based on gray matter volume covariance. Hum. Brain Mapp. 36, 538–548 (2015)
Merolla, P.A., Arthur, J.V., Alvarez-Icaza, R., Cassidy, A.S., Sawada, J., Akopyan, F., Jackson, B.L., Imam, N., Guo, C., Nakamura, Y., Brezzo, B., Vo, I., Esser, S.K., Appuswamy, R., Taba, B., Amir, A., Flickner, M.D., Risk, W.P., Manohar, R., Modha, D.S.: Artificial brains. A million spiking-neuron integrated circuit with a scalable communication network and interface. Science 345, 668–673 (2014)
Modha, D.S., Singh, R.: Network architecture of the long-distance pathways in the macaque brain. Proc. Natl. Acad. Sci. USA 107, 13485–13490 (2010)
Frackowiak, R., Markram, H.: The future of human cerebral cartography: a novel approach. Philos. Trans. Roy. Soc. Lond. B Biol. Sci. 370 (2015). doi:10.1098/rstb.2014.0171
Glasser, M.F., Coalson, T.S., Robinson, E.C., Hacker, C.D., Harwell, J., Yacoub, E., Ugurbil, K., Andersson, J., Beckmann, C.F., Jenkinson, M., Smith, S.M., Van Essen, D.C.: A multi-modal parcellation of human cerebral cortex. Nature 536, 171–178 (2016)
Paxinos, G.: Human brainnetome atlas: a new chapter of brain cartography. Sci. China Life Sci. 59(9), 965–967 (2016)
Richardson, D.S., Lichtman, J.W.: Clarifying tissue clearing. Cell 162, 246–257 (2015)
Kasthuri, N., Hayworth, K.J., Berger, D.R., Schalek, R.L., Conchello, J.A., Knowles-Barley, S., Lee, D., Vazquez-Reina, A., Kaynig, V., Jones, T.R., Roberts, M., Morgan, J.L., Tapia, J.C., Seung, H.S., Roncal, W.G., Vogelstein, J.T., Burns, R., Sussman, D.L., Priebe, C.E., Pfister, H., Lichtman, J.W.: Saturated reconstruction of a volume of neocortex. Cell 162, 648–661 (2015)
Acknowledgements
We thank Yu Zhang, Yong Yang, Junjie Zhuo, and Jiaojian Wang for their help with manuscript preparation and Rhoda E. and Edmund F. Perozzi for editing assistance and discussions. This work was partially supported by the National Key Basic Research and Development Program (973) (Grant No. 2011CB707801 and 2012CB720702), the Strategic Priority Research Program of the Chinese Academy of Sciences (Grant No. XDB02030300), the Natural Science Foundation of China (Grant Nos. 91432302, 91132301, 31620103905, 81270020 and 81501179).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing AG
About this paper
Cite this paper
Fan, L., Li, H., Yu, S., Jiang, T. (2016). Human Brainnetome Atlas and Its Potential Applications in Brain-Inspired Computing. In: Amunts, K., Grandinetti, L., Lippert, T., Petkov, N. (eds) Brain-Inspired Computing. BrainComp 2015. Lecture Notes in Computer Science(), vol 10087. Springer, Cham. https://doi.org/10.1007/978-3-319-50862-7_1
Download citation
DOI: https://doi.org/10.1007/978-3-319-50862-7_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-50861-0
Online ISBN: 978-3-319-50862-7
eBook Packages: Computer ScienceComputer Science (R0)