
Abstract
There are several measures for the convexity of digital images that extend the basic binary decision of the classic geometrical convexity. Some algorithms measure the convexity of a binary image using intensity profiles from horizontal and vertical directions. In this paper, we generalize the idea of binary, directional convexity and evaluate the proposed algorithm on gray-scale images. Furthermore, instead of a single convexity value, a vector can be formed using our approach, which provides a more prominent feature for various applications, such as computer vision, classification, retrieval, or medical image processing. The proposed feature can also be used locally on image parts, which makes that applicable as a shape descriptor.
The research was supported by the NKFIH OTKA [grant number K112998].
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Convexity is a widely studied and applied shape descriptor in image analysis and classification. On digital shapes, there are various measures that approximate the continuous convexity, like area based [6, 19, 20] and boundary-based ones [22]. It shall be noted that many convexity measures produce continuous output [15, 17, 18], unlike the classic, geometrical approach, which gives a binary decision whether or not the observed shape is convex.
In case of digital images, directional convexity is a common alternative for the convexity for continuous shapes, due to the pixel-based representation of the image. Mostly horizontal and vertical convexity is used (shortly, hv-convexity), which means that the convexity measure is defined by the aggregation of the convexity degree along horizontal and vertical sweeping lines. The property of hv-convexity is deeply studied in Binary Tomography [14], where one problem in focus is to reconstruct binary images (matrices) from their row and column sums according to geometrical constraints. Several reconstruction methods utilize the preliminary information of hv-convexity about the binary image to be reconstructed [3, 8, 11]. Enforcing compactness of the image to reconstruct can also result in binary images which are (almost) hv-convex [12]. In [21] the authors introduced a measure of directional convexity and proved it to be useful in binary tomographic reconstruction. However, they also showed that a 2D extension of this measure is not straightforward [2]. Later, immediate 2D convexity measures were also proposed in [1, 9], while in [5] an upgrade of the measure of [2] was published.
The aim of this paper is to generalize the directional convexity measure from binary to gray-scale images, that can be used with existing binary convexity measures [1, 5, 21]. The structure of the paper is the following. In Sect. 2 we describe the proposed gray-scale convexity measure. In Sect. 3 we present experimental results. Section 4 is for the conclusion.
2 The Proposed Gray-Scale Convexity Measure
2.1 Preliminaries
A digital image M is a matrix having m rows and n columns (where \(m,n\in \mathbb {N}\)). Numbering of rows and columns start with 1 from top to bottom and left to right, respectively. If M is a digital image then \(M^T\) is the image we get by interchanging the rows and columns of M. Let \(I=\{i_0,\dots , i_l\}\) be the set of possible intensity values of the image such that \(i_k<i_{k+1}\) (\(k=0,\dots ,l-1\)) and \(M(r,c) \in I\) denote the intensity value corresponding to the position (r, c). A typical choice is \(I=\{ 0,\dots ,255\}\) (8-bit images) or \(I=\{ 0,\dots ,65535\}\) (16-bit images).
For binary images \(I=\{ 0,1\}\). In this case, a run of object (background) points within a row or column is a sequence of consecutive pixels, all of them being object (resp. background) points, such that it cannot be expanded by further neighboring pixels of the same color. Obviously, each row and column of the image can be expressed by an alternating sequence of object and background runs. The length of an arbitrary run a will be denoted by |a|.
2.2 Measure of hv-Convexity for Binary Images
Originally, we follow the idea of hv-convexity measuring on binary images in [5] which is a modified version of [2]. According to that paper, first, the convexity defect \(\varphi ^{bin}_h (r)\) for each row \(r=1,\dots , m\) is calculated in the following way (bin stands for “binary”).
Let R be the pixel sequence of an arbitrary row. To compute the non-convexity of R, we split it into a list of object and background runs. If the first or last run is a background run then we omit them. Thus the rest of the row can be encoded as \(R=b_1w_1b_2w_2\dots w_{n-1}b_n\), where each \(b_i\) is an object run (\(i=1,\dots , n\)) and each \(w_i\) (\(i=1,\dots , n-1\)) is a background run.
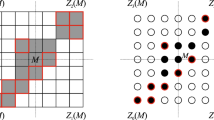
Let \(O_R\) be the ordered set of object runs in row r, i.e., \(O_R = \{b_1, b_2, \dots , b_n\}\). The sum of object pixels in R is \(N_R = |b_1|+|b_2|+\dots +|b_n|\). Now, let \(b_i, b_j\in O_R\) such that \(i<j\). We select one random point from both, say, the k-th from left in \(b_i\) denoted by \(b_{i_k}\) and the l-th from left in \(b_j\) denoted by \(b_{j_l}\). The section connecting these two points is characterized by the non-convexity measure, which value depends on the number of background pixels between \(b_i\) and \(b_j\). Let \(W_{i,j}=\sum _{l=i}^{j-1}|w_l|\), \(B_{i,j}=\sum _{l=i+1}^{j-1}|b_l|\) and \(d_{i_k,j_l}\) denote the distance of the two chosen points. This distance is partially made up of the points of \(b_i\) to the right of \(b_{i_k}\), the points of \(b_j\) to the left of \(b_{j_l}\). There are, \(\vert b_i \vert - k +1\) and l such points (including the chosen points, too), respectively. Additionally, the section contains the \(W_{i,j}\) background points, and further object point runs (\(B_{i,j}\)), if \(j>i+1\). That is, \(d_{i_k,j_l} = \vert b_i \vert - k + 1 + W_{i,j} + B_{i,j} + l\) (Fig. 1 illustrates the calculation). The normalized non-convexity measure for this section is
and the cumulated non-convexity of R is
where \(C_r\) is the number of combinations to select the two object points from different object point runs, computed as

Calculation of the non-convexity between two object points from different object runs, proposed in [5].
The horizontal convexity of M is defined as
The vertical convexity \(\varPsi ^{bin}_v(M)\) can be calculated analogously by the observation that \(\varPsi ^{bin}_v(M)=\varPsi ^{bin}_h(M^T)\). Finally, the hv-convexity is the algebraic mean of the horizontal and vertical convexity, i.e.,
2.3 Extension of the Convexity Measure to Gray-Scale Images
The aforementioned approach only measures convexity of binary images, since we need to define sequences of object and background pixels. In most cases, binarization is solved by thresholding (for example, with Otsu’s method [16]), which leads to loss of information. To overcome this, we propose to aggregate the convexity using all possible thresholds. Let T(M, t) denote the binary image we get by thresholding M at level t. For the continuous case, convexity is computed as
This calculation theoretically takes infinite time, however, it collapses to a factor of \(\mathcal {O}(|I|)\) when the input is quantized. Assuming that the image is in the positive intensity range, convexity is computed as
The aforementioned approach calculates the convexity of the same binary image multiple times if the intensity value t does not occur within the original one. Exploiting this, the calculation of T(M, t) is only necessary where \(t \in J\) with \(J=\{j_0,j_1,\dots , j_{|J|-1}\}\subseteq I\) being the ordered set of distinct intensity values of I. For the sake of technical simplicity we assume that the maximal element \(i_l\) of I is always contained in J even if it is not present in the image. Each \(\varPsi ^{bin}_{hv}(T(M,t))\) can be assigned a weight, reflecting how many times we could have calculated that. Let W(t) be a weight corresponding to t. We perform thresholding at all intensity levels of J and aggregate the results of binary convexity measures (Algorithm 1) as
with

The weight values W(t) would be 1 for all t input, if all intensities occur in the image within the full intensity range. For an other example, if \(I=\{0,1,2,3,4\}\) and the ordered set of intensities in the image is \(J=\{0, 1, 4\}\), then the corresponding weights are \(\{1, 1, 3\}\). It shall be noted that the sum of weights is always equal to the size of the intensity range in which the image is represented.
3 Evaluation and Experiments
Our first experiment is about to show the basic difference between the original binary convexity [5] and the proposed one. In Fig. 2, binary thresholding leads to the same result for both squares. On the other hand, the proposed algorithm forms the weighted sum of thresholds on all occurring gray levels, and can differentiate between the two images. It gives a convexity value of 0.8940 for the gray-scale image and 0.5975 to its binarized version.

Images of two empty square objects and their corresponding convexity values. The gray square is intuitively more “full”, which attribute is also supported by the proposed gray-scale convexity value.
We also examined the proposed algorithm on a real gray-scale image (Fig. 3). We thresholded the image at 50% of the intensity range, produced another image using 16 quantization levels, and finally, measured the hv-convexity of the original 8-bit image. According to this example, the quantization levels may be reduced for 8-bit images in order to achieve faster run-time of the algorithm, however, that only gives an approximation of the original convexity.

The proposed approach on a real 8-bit image.
It shall be noted that not only a scalar value can be derived from this approach. If desired, the convexity values can be used for each occurring intensity (Figs. 4 and 5). Thus, two vectors can be formed for each image, one containing the convexity values for each threshold level, and another with the corresponding weights. Both vectors have the same length (the number of distinct intensities of the source image). Those vectors can also be computed locally on image parts, which renders them applicable as a shape descriptor for computer vision, classification and object recognition.

Convexity values for the 8-bit real image (represented in Fig. 3) and its 16-level quantized version w.r.t. threshold level. The vector of individual convexities may give a more prominent feature for classification tasks than a single convexity value.

The thresholded versions of the image represented on Fig. 3, quantized to 16 levels, and its corresponding values of h-, v-, and hv-convexity.
The proposed generalization of the binary convexity measure has the same behavior w.r.t. rotation and scale invariance than the original convexity measure we generalize. While this paper only evaluates the convexity measure of [5], the proposed idea can be used with other binary convexity measures as well [1].
4 Conclusion
In this paper, we presented a gray-scale generalization of an hv-convexity measure for binary images. Using this approach, the loss of information at the thresholding step is avoided, while all existing convexity measures that work on binary images [1, 2, 5] can be adapted to work on gray-scale images, too. Having only a few distinct intensity levels in an image, the calculation can be performed rapidly. If less precise calculation is acceptable and speed is more desired, intensity levels of the image may be further quantized.
The descriptor can be also computed locally to an image part, therefore it may also be used as an additional shape descriptor in applications, such as computer vision, classification, object recognition, image retrieval, or medical image processing. A further perspective is to use the single gray-scale convexity measure as prior information in multivalued discrete tomography. The reconstruction of multicolor images (i.e., containing at least 3 different gray intensity values) is in general an NP-hard problem, however, for certain image classes and/or with appropriate heuristics it can be effectively solved [4, 7, 10, 13]. It needs a further investigation whether gray-level convexity measures can also facilitate such kind of reconstruction problems.
References
Balázs, P., Brunetti, S.: A measure of Q-convexity. In: Normand, N., Guédon, J., Autrusseau, F. (eds.) DGCI 2016. LNCS, vol. 9647, pp. 219–230. Springer, Cham (2016). doi:10.1007/978-3-319-32360-2_17
Balázs, P., Ozsvár, Z., Tasi, T.S., Nyúl, L.G.: A measure of directional convexity inspired by binary tomography. Fundam. Inform. 141(2–3), 151–167 (2015)
Barcucci, E., Del Lungo, A., Nivat, M., Pinzani, R.: Medians of polyominoes: a property for reconstruction. Int. J. Imaging Syst. Technol. 9(2–3), 69–77 (1998)
Barcucci, E., Brocchi, S., Frosini, A.: Solving the two color problem: an heuristic algorithm. In: Aggarwal, J.K., Barneva, R.P., Brimkov, V.E., Koroutchev, K.N., Korutcheva, E.R. (eds.) IWCIA 2011. LNCS, vol. 6636, pp. 298–310. Springer, Heidelberg (2011). doi:10.1007/978-3-642-21073-0_27
Bodnár, P., Balázs, P.: An improved directional convexity measure for binary images. In: Karray, F., Campilho, A., Cheriet, F. (eds.) ICIAR 2017. LNCS, vol. 10317, pp. 278–285. Springer, Cham (2017). doi:10.1007/978-3-319-59876-5_31
Boxer, L.: Computing deviations from convexity in polygons. Pattern Recogn. Lett. 14(3), 163–167 (1993)
Brocchi, S., Frosini, A., Rinaldi, S.: A reconstruction algorithm for a subclass of instances of the 2-color problem. Theor. Comput. Sci. 412(36), 4795–4804 (2011)
Brunetti, S., Lungo, A.D., Ristoro, F.D., Kuba, A., Nivat, M.: Reconstruction of 4- and 8-connected convex discrete sets from row and column projections. Linear Algebra Appl. 339(1), 37–57 (2001)
Brunetti, S., Balázs, P., Bodnár, P.: Extension of a one-dimensional convexity measure to two dimensions. In: Brimkov, V.E., Barneva, R.P. (eds.) IWCIA 2017. LNCS, vol. 10256, pp. 105–116. Springer, Cham (2017). doi:10.1007/978-3-319-59108-7_9
Chrobak, M., Dürr, C.: Reconstructing polyatomic structures from discrete X-rays: NP-completeness proof for three atoms. In: Brim, L., Gruska, J., Zlatuška, J. (eds.) MFCS 1998. LNCS, vol. 1450, pp. 185–193. Springer, Heidelberg (1998). doi:10.1007/BFb0055767
Chrobak, M., Durr, C.: Reconstructing hv-convex polyominoes from orthogonal projections. Inf. Proc. Lett. 69(6), 283–289 (1999)
Cipolla, M., Bosco, G.L., Millonzi, F., Valenti, C.: An island strategy for memetic discrete tomography reconstruction. Inf. Sci. 257, 357–368 (2014)
Dürr, C., Gunez, F., Matamala, M.: Reconstructing 3-colored grids from horizontal and vertical projections is NP-hard: a solution to the 2-atom problem in discrete tomography. SIAM J. Discret. Math. 26(1), 330–352 (2012)
Herman, G.T., Kuba, A.: Advances in Discrete Tomography and Its Applications. Applied and Numerical Harmonic Analysis. Birkhauser, Boston (2007)
Latecki, L.J., Lakamper, R.: Convexity rule for shape decomposition based on discrete contour evolution. Comput. Vis. Image Underst. 73(3), 441–454 (1999)
Otsu, N.: A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 9(1), 62–66 (1979)
Rahtu, E., Salo, M., Heikkila, J.: A new convexity measure based on a probabilistic interpretation of images. IEEE Trans. Pattern Anal. Mach. Intell. 28(9), 1501–1512 (2006)
Rosin, P.L., Žunić, J.: Probabilistic convexity measure. IET Image Proc. 1(2), 182–188 (2007)
Sonka, M., Hlavac, V., Boyle, R.: Image Processing, Analysis, and Machine Vision. Cengage Learning, Boston (2014)
Stern, H.I.: Polygonal entropy: a convexity measure. Pattern Recogn. Lett. 10(4), 229–235 (1989)
Tasi, T.S., Nyúl, L.G., Balázs, P.: Directional convexity measure for binary tomography. In: Ruiz-Shulcloper, J., Sanniti di Baja, G. (eds.) CIARP 2013. LNCS, vol. 8259, pp. 9–16. Springer, Heidelberg (2013). doi:10.1007/978-3-642-41827-3_2
Zunic, J., Rosin, P.L.: A new convexity measure for polygons. IEEE Trans. Pattern Anal. Mach. Intell. 26(7), 923–934 (2004)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Bodnár, P., Balázs, P., Nyúl, L.G. (2017). A Convexity Measure for Gray-Scale Images Based on hv-Convexity. In: Battiato, S., Gallo, G., Schettini, R., Stanco, F. (eds) Image Analysis and Processing - ICIAP 2017 . ICIAP 2017. Lecture Notes in Computer Science(), vol 10484. Springer, Cham. https://doi.org/10.1007/978-3-319-68560-1_52
Download citation
DOI: https://doi.org/10.1007/978-3-319-68560-1_52
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-68559-5
Online ISBN: 978-3-319-68560-1
eBook Packages: Computer ScienceComputer Science (R0)
