
Abstract
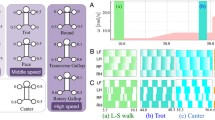
Animal locomotion is generated and controlled, in part, by a central pattern generator (CPG), which is an intraspinal network of neurons capable of producing rhythmic output. In the present work, it is demonstrated that a hard-wired CPG model, made up of four coupled nonlinear oscillators, can produce multiple phase-locked oscillation patterns that correspond to three common quadrupedal gaits — the walk, trot, and bound. Transitions between the different gaits are generated by varying the network's driving signal and/or by altering internal oscillator parameters. The above in numero results are obtained without changing the relative strengths or the polarities of the system's synaptic interconnections, i.e., the network maintains an invariant coupling architecture. It is also shown that the ability of the hard-wired CPG network to produce and switch between multiple gait patterns is a model-independent phenomenon, i.e., it does not depend upon the detailed dynamics of the component oscillators and/or the nature of the inter-oscillator coupling. Three different neuronal oscillator models — the Stein neuronal model, the Van der Pol oscillator, and the FitzHugh-Nagumo model -and two different coupling schemes are incorporated into the network without impeding its ability to produce the three quadrupedal gaits and the aforementioned gait transitions.
Similar content being viewed by others


References
Afelt Z, Blaszczyk J, Dobrzecka C (1983) Speed control in animal locomotion: transitions between symmetrical and nonsymmetrical gaits in the dog. Acta Neurobiol Exp 43:235–250
Alexander JC, Doedel EJ, Othmer HG (1989) Resonance and phaselocking in excitable systems. In: Othmer HG (ed) Some mathematical questions in biology: the dynamics of excitable media, Vol 21. American Mathematics Society, Providence, pp 1–37
Alexander RMcN, Jayes AS (1983) A dynamic similarity hypothesis for the gaits of quadrupedal mammals. J Zool Lond 201:135–152
Andersson O, Grillner S (1993) Peripheral control of the cat's step cycle. II. Entrainment of the central pattern generators for locomotion by sinusoidal hip movements during “fictive locomotion”. Acta Physiol Scand 118:229–239
Arshavsky YI, Kots YM, Orlovsky GN, Rodionov IM, Shik ML (1965) Investigation of the biomechanics of running by the dog. Biophysics 10:737–746
Ashwin P (1990) Symmetric chaos in systems of three and four forced oscillators. Nonlinearity 3:603–617
Bässler U (1986) On the definition of central pattern generator and its sensory control. Biol Cybern 54:65–69
Bay JS, Hemami H (1987) Modeling of a neural pattern generator with coupled nonlinear oscillators. IEEE Trans Biomed Eng 34:297–306
Beer RD (1990) Intelligence as adaptive behavior: an experiment in computational neurothology. Academic Press, San Diego
Beer RD, Chiel HJ, Quinn RD, Espenschied KS, Larsson P (1992) A distributed neural network architecture for hexapod robot locomotion. Neural Comput 4:356–365
Chiel HJ, Beer RD, Quinn RD, Espenschied KS (1992) Robustness of a distributed neural network controller for locomotion in a hexapod robot. IEEE Trans Robot Autom 8:293–303
Collins JJ (1995) Gait transitions. In: Arbib MA (ed) The handbook of brain theory and neural networks. MIT Press, Cambridge, Ma. (in press)
Collins JJ, Stewart IN (1992) Symmetry-breaking bifurcation: a possible mechanism for 2:1 frequency-locking in animal locomotion. J Math Biol 30:827–838
Collins JJ, Stewart IN (1993a) Coupled nonlinear oscillators and the symmetries of animal gaits. J Nonlinear Sci 3:349–392
Collins JJ, Stewart I (1993b) Hexapodal gaits and coupled nonlinear oscillator models. Biol Cybern 68:287–298
Dagg AI (1973) Gaits in mammals. Mammal Rev 3:135–154
Davis WJ, Kennedy D (1972) Command interneurons controlling swimmeret movements in the lobster. I. Types of effects on motoneurons. J Neurophysiol 35:1–12
Delcomyn F (1980) Neural basis of rhythmic behavior in animals. Science 210:492–498
Deuel NR, Lawrence LM (1987) Laterality in the gallop gait of horses. J Biomech 20:645–649
Edelstein-Keshet L (1988) Mathematical models in biology. Random House, New York
Farley CT, Taylor CR (1991) A mechanical trigger for the trot-gallop transition in horses. Science 253:306–308
FitzHugh R (1961) Impulses and physiological states in theoretical models of nerve membrane. Biophys J 1:445–466
Flaherty JE, Hoppensteadt FC (1978) Frequency entrainment of a forced van der Pol oscillator. Stud Appl Math 58:5–15
Gambaryan P (1974) How mammals run: anatomical adaptations. Wiley, New York
Getting PA (1989) Emerging principles governing the operation of neural networks. Annu Rev Neurosci 12:185–204
Grillner S (1975) Locomotion in vertebrates: central mechanisms and reflex interaction. Physiol Rev 55:247–304
Grillner S (1981) Control of locomotion in bipeds, tetrapods and fish. In: Brooks VB (ed) Handbook of physiology, Sect 1. The nervous system, Vol II. Motor control. American Physiological Society Bethesda, pp 1179–1236
Grillner S (1985) Neurological bases of rhythmic motor acts in vertebrates. Science 228:143–149
Grillner S, Wallén P (1985) Central pattern generators for locomotion, with special reference to vertebrates. Annu Rev Neurosci 8:233–261
Harris-Warrick RM (1988) Chemical modulation of central pattern generators. In: Cohen AH, Rossignol S, Grillner S (eds) Neural control of rhythmic movements in vertebrates. Wiley, New York, pp 285–331
Harris-Warrick RM, Marder E (1991) Modulation of neural networks for behavior. Annu Rev Neurosci 14:39–57
Hildebrand M (1976) Analysis of tetrapod gaits: general considerations and symmetrical gaits. In: Herman RM, Grillner S, Stein PSG, Stuart DG (eds) Neural control of locomotion. Plenum Press, New York, pp 203–236
Hildebrand M (1977) Analysis of asymmetrical gaits. J Mammal 58:131–156
Hoyt DF, Taylor CR (1981) Gait and the energetics of locomotion in horses. Nature 292:239–240
Jayes AS, Alexander RMcN (1978) Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aris). J Zool Lond 185:289–308
Jeka JJ, Kelso JAS, Kiemel T (1993a) Pattern switching in human multilimb coordination dynamics. Bull Math Biol 55:829–845
Jeka JJ, Kelso JAS, Kiemel T (1993b) Spontaneous transitions and symmetry: pattern dynamics in human four-limb coordination. Hum Mov Sci 12:627–651
Kaczmarek LK, Levitan IB (1987) Neuromodulation. Oxford University Press, New York
Kelso JAS, Jeka JJ (1992) Symmetry breaking dynamics of human multilimb coordination. J Exp Psychol [Hum Percept] 18:645–668
Kleinfeld D, Raccuia-Behling F, Chiel HJ (1990) Circuits constructed from identified Aplysia neurons exhibit multiple patterns of persistent activity. Biophys J 57:697–715
Kopell N (1988) Toward a theory of modelling central pattern generators. In: Cohen AH, Rossignol S, Grillner S (eds) Neural control of rhythmic movements in vertebrates. Wiley, New York, pp 369–413
Lennard PR, Stein PSG (1977) Swimming movements elicited by electrical stimulation of turtle spinal cord. I. Low-spinal and intact preparations. J Neurophysiol 40:768–778
Nagumo J, Arimoto S, Yoshizawa S (1962) An active pulse transmission line simulating nerve axon. Proc IRE 50:2061–2070
Pearson KG (1993) Common principles of motor control in vertebrates and invertebrates. Annu Rev Neurosci 16:265–297
Pearson KG, Ramirez JM, Jiang W (1992) Entrainment of the locomotor rhythm by group Ib afferents from ankle extensor muscles in spinal cats. Exp Brain Res 90:557–566
Pecora LM, Carroll TL (1991) Pseudoperiodic driving: eliminating multiple domains of attraction using chaos. Phys Rev Lett 67:945–948
Rand RH, Cohen AH, Holmes PJ (1988) Systems of coupled oscillators as models of central pattern generators. In: Cohen AH, Rossignol S, Grillner S (eds) Neural control of rhythmic movements in vertebrates. Wiley, New York, pp 333–367
Schöner G, Jiang WY, Kelso JAS (1990) A synergetic theory of quadrupedal gaits and gait transitions. J Theor Biol 142:359–391
Sharp AA, Abbott LF, Marder E (1992) Artificial electrical synapses in oscillatory networks. J Neurophysiol 67:1691–1694
Sharp AA, O'Neil MB, Abbott LF, Marder E (1993) Dynamic clamp: computer-generated conductances in real neurons. J Neurophysiol 69:992–995
Shik ML, Orlovsky GN (1976) Neurophysiology of locomotor automatism. Physiol Rev 56:465–501
Shik ML, Severin FV, Orlovsky GN (1966) Control of walking and running by means of electrical stimulation of the mid-brain. Biophysics 11:756–765
Stafford FS, Barnwell GM (1985) Mathematical models of central pattern generators in locomotion. III. Interlimb model for the cat. J Motor Behav 17:60–76
Stein PSG (1978) Motor systems, with specific reference to the control of locomotion. Annu Rev Neurosci 1:61–81
Stein RB, Leung KV, Mangeron D, 385–01 MN (1974a) Improved neuronal models for studying neural networks. Kybernetik 15:1–9
Stein RB, Leung KV, 385–02 MN, Williams DW (1974b) Properties of small neural networks. Kybernetik 14:223–230
Syed NI, Bulloch AGM, Lukowiak K (1990) In vitro reconstruction of the respiratory central pattern generator of the mollusk Lymnaea. Science 250:282–285
Taga G, Yamaguchi Y, Shimizu H (1991) Self-organized control of bipedal locomotion by neural oscillators in unpredictable environment. Biol Cybern 65:147–159
Taylor CR (1978) Why change gaits? Recruitment of muscles and muscle fibers as a function of speed and gait. Am Zool 18:153–161
Willis JB (1980) On the interaction between spinal locomotor generators in quadrupeds. Brain Res Rev 2:171–204
Winfree AT (1990) The geometry of biological time. Springer, Berlin Heidelberg New York
Yuasa H, Ito M (1990) Coordination of many oscillators and generation of locomotory patterns. Biol Cybern 63:177–184
Yuasa H, Ito M (1992) Generation of locomotive patterns and self-organization. J Robot Mechatron 4:142–147
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Collins, J.J., Richmond, S.A. Hard-wired central pattern generators for quadrupedal locomotion. Biol. Cybern. 71, 375–385 (1994). https://doi.org/10.1007/BF00198915
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/BF00198915