
Abstract
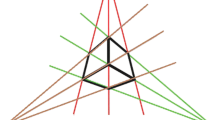
A new approach to camera calibration using vanishing line information for three-dimensional computer vision is proposed. Calibrated parameters include the orientation, the position, the focal length, and the image plane center of a camera. A rectangular parallelepiped is employed as the calibration target to generate three principal vanishing points and then three vanishing lines from the projected image of the parallelepiped. Only a monocular image is required for solving these camera parameters. It is shown that the image plane center is the orthocenter of a triangle formed by the three vanishing lines. From the slopes of the vanishing lines the camera orientation parameters can be determined. The focal length can be computed by the area of the triangle. The camera position parameters can then be calibrated by using related geometric projective relationships. The derived results show the geometric meanings of these camera parameters. The calibration formulas are analytic and simple to compute. Experimental results show the feasibility of the proposed approach for a practical application—autonomous land vehicle guidance.
Similar content being viewed by others


References
Abdel-Aziz YI, Karara HM (1971) Direct linear transformation into object space coordinates in close-range photogrammetry. In: Proceedings of Symposium on Close-Range Photogrammetry, University of Illinois at Urbana-Champaign, Urbana, pp 1–18
Abdel-Aziz YI, Karara HM (1974) Photogrammetric Potential of Non-Metric Cameras, Civil Engineering Studies, Photogrammetry Series 36, Urbana, IL, University of Illinois
Chang MS, Ku PY, Wang LL, Tsai WH (1989) Indoor autonomous land vehicle guidance by baseline following using computer vision techniques. In: Proceedings of Workshop on Computer Vision, Graphics and Image Processing, Taiwan, R.O.C., pp 135–144
Chen RK, Tsai WH (1987) 3-D object surface data acquisition using laser striping. In: Proceedings of Workshop on Computer Vision, Graphics and Image Processing, Chitou, Taiwan, R.O.C., pp 31–58
Chou HL, Tsai WH (1986) A new approach to robot location by house corners. Pattern Recognition 19(6):439–451
Courtney JW, Magee MJ, Aggarwal JK (1984) Robot guidance using computer vision. Pattern Recognition 17:585–592
Faig W (1975) Calibration of close-range photogrammetry systems: Mathematical formulation. Photogrammetric Engineering and Remote Sensing 41:1479–1486
Fischler MA, Bolles RC (1981) Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Communications of the ACM 24(6):381–395
Foley JD, Dam AV (1982) Fundamentals of Interactive Computer Graphics, Addison-Wesley, Reading, MA
Fukui I (1981) TV image processing to determine the position of a robot vehicle. Pattern Recognition 14:101–109
Ganapathy S (1984) Decomposition of transformation matrices for robot vision. In: Proceedings of IEEE Conference on Robotics and Automation, Atlanta, GA, pp 130–139
Haralick RM (1980) Using perspective transformations in scene analysis. Computer Graphics and Image Processing 13:191–221
Jiang BC (1987) Camera calibration technique using vanishing point concept. In: Proceedings of IEEE Conference on Pattern Recognition, pp 640–644
Ku PY, Tsai WH (1989) Model-based guidance of autonomous land vehicles for indoor navigation. In: Proceedings of Workshop on Computer Vision, Graphics and Image Processing, Taiwan, R.O.C., pp 165–174
Lenz RK, Tsai RY (1988) Techniques for calibration of the scale factor and image center for high accuracy 3-D machine vision metrology. IEEE Transactions on Pattern Analysis and Machine Intelligence 10(5):713–720
Liou SP, Jain RC (1987) Road following using vanishing points. Computer Vision, Graphics, and Image Processing 39:116–130
Magee MJ, Aggarwal JK (1984) Determining the position of a robot using a single calibration object. In: Proceedings of IEEE Conference on Robotics, Atlanta, GA, pp 140–149
Odone B et al. (1986) On the understanding of motion of rigid objects. SPIE Intelligent Robots and Computer Vision 726:197–205
Shafer SA, Kanada T, Render JR (1982) Gradient space under orthography and perspective. IEEE 1982 Workshop on Computer Vision: Representative and Control, Franklin Pierce College, Rindge, NH, pp 26–34
Sobel I (1974) On calibrating computer controlled cameras for perceiving 3-D scenes. Artificial Intelligence 5:185–198
Tsai RY (1987) A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lens. IEEE Journal of Robotics and Automation RA-3(4):323–344
Tsai WH (1985) Moment-preserving thresholding: A new approach. Computer Vision, Graphics, and Image Processing 29:377–393
Author information
Authors and Affiliations
Additional information
This work was supported by National Science Council, Republic of China under Grant NSC-77-0404-E-009-31.
Rights and permissions
About this article
Cite this article
Wang, L.L., Tsai, W.H. Computing camera parameters using vanishing-line information from a rectangular parallelepiped. Machine Vis. Apps. 3, 129–141 (1990). https://doi.org/10.1007/BF01214426
Issue Date:
DOI: https://doi.org/10.1007/BF01214426