
Abstract
The assumption that observed signals are ideally received is commonly used in the literature on time-delay estimation. However, for practical digital receivers, the received radio-frequency signals are usually downconverted to the baseband and digitized by analog-to-digital converters. Because inaccurate and unstable system clocks are used, frequency and phase offsets are usually induced by the frequency-mixing procedure, whereas a time stretch may ensue from the sampling procedure. The aforementioned problems are almost inevitable for incoherent reception systems. Therefore, the neglect of imperfect reception for incoherent systems may reduce the performance of conventional time-delay estimation methods. In this paper, employing refined signal models developed specifically for incoherent time-delay estimation in active and passive systems, the corresponding joint maximum likelihood estimates of time delay and system-clock frequency error are proposed. The Cramér–Rao lower bounds (CRLBs) on time-delay and clock frequency error estimations are also derived. The performance of the proposed time-delay estimators can be improved for frequency/phase offsets and time stretches, approaching the performance of the CRLBs in scenarios of moderate and high signal-to-noise ratios. Furthermore, both CRLBs analysis and simulation results verify that the accuracy of the proposed time-delay estimator is unaffected by the performance of the system clock in moderate scenarios.











Similar content being viewed by others

Notes
The synchronization clock bias is also referred to as the timing error in [19], which is equivalent to the clock initial phase error rather than the clock frequency error.
Parts of the present work have been presented at ICASSP 2014 [22].
The time-varying phase noise of the system clock is ignored.
The time stretch may be interpreted as the phenomenon that the same number of sample points correspond to different lengths of time when different sampling periods are employed.
The discrete CRLB on TDE derived from the continuous CRLB is given by (3.38) in [11]. Herein, the discrete and continuous CRLBs denote the CRLBs under discrete signal and continuous signal models, respectively.
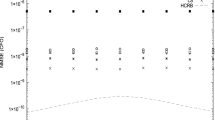
According to the Carson bandwidth rule [4], the bandwidth of an FM signal is \(B_{\mathrm{FM}}=2\left( \frac{\varDelta f}{f_{\mathrm{b}}}+1\right) f_{\mathrm{b}}\). Therefore, the signal bandwidths are \(20.2, 40.2, 60.2, \ldots , 200.2\) kHz, respectively.
A frequency deviation \(<\)0.5 ppm can be easily achieved by inexpensive oscillators.
Small relative frequency deviation is assumed to simplify the derivation of the CRLB for passive systems. However, it is not needed in implementing the proposed method.
According to the known formula of a signal waveform in an active system, \({\dot{\mathbf{s}}}\) may be also be directly calculated via the differential operation of the signal \({\mathbf{s}}_{D,\beta }\).
The accuracy of a modern low-cost oscillator could be superior to 1 ppm. This approximation is used here only to simplify the derivation of the CRLBs and is not needed for the proposed estimator.
Because the formula of the signal waveform is unknown for a passive system, \(\dot{\mathbf{s}}^H \dot{\mathbf{s}}\) may also be approximated as \([{\mathrm{diff}} \{ {\mathbf{s}}_{D,\beta }^\mathrm{T} \}]^H[{\mathrm{diff}} \{ {\mathbf{s}}_{D,\beta }^\mathrm{T} \}]\) with \({\mathrm{diff}} \{ \cdot \}\) denoting the differential operator.
References
J. Benesty, J. Chen, Y. Huang, Time-delay estimation via linear interpolation and cross correlation. IEEE Trans. Speech Audio Process. 12(5), 509–519 (2004)
M. Bekara, M.V.D. Baan, A New Parametric Method for Time Delay Estimation, in Proceedings of the ICASSP, Honolulu, pp. 1033–1036 (2007)
G.C. Carter, Coherence and time delay estimation. Proc. IEEE 75(2), 236–255 (1987)
L.W. Couch, Digital and Analog Communication Systems, 7th edn. (Prentice Hall, Upper Saddle River, 2006)
Z. Cheng, T.T. Tjhung, A new time delay estimator based on ETDE. IEEE Trans. Signal Process. 51(7), 1859–1869 (2003)
J. Falk, P. Händel, M. Jansson, Effects of Frequency and Phase Errors in Electronic Warfare TDOA Direction-Finding Systems, in Proceedings of the Military Communications Conference (MILCOM), pp. 118–123 (2003)
M.L. Fowler, X. Hu, Signal models for TDOA/FDOA estimation. IEEE Trans. Aerosp. Electron. Syst. 44(4), 1543–1550 (2008)
F.X. Ge, D. Shen, Y. Peng, V.O.K. Li, Super-resolution time delay estimation in multipath environments. IEEE Trans. Circuits Syst. I Regul. Pap. 54(9), 1977–1986 (2007)
B. Jiang, F.H. Chen, High precision time delay estimation using generalised MVDR cross spectrum. IET Electron. Lett. 43(2), 131–133 (2007)
C.H. Knapp, G.C. Carter, The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 24(4), 320–327 (1976)
S.M. Kay, Fundamentals of Statistical Signal Processing, Volume I: Estimation Theory (Prentice-Hall, Englewood Cliffs, 1993)
X. Li, X. Ma, S. Yan, C. Hou, Super-resolution time delay estimation for narrowband signal. IET Radar Sonar Navig. 6(8), 781–787 (2012)
A.G. Piersol, Time delay estimation using phase data. IEEE Trans. Acoust. Speech Signal Process. 29(3), 471–477 (1981)
H.C. So, P.C. Ching, Y.T. Chan, A new algorithm for explicit adaptation of time delay. IEEE Trans. Signal Process. 42(7), 1816–1820 (1994)
H.C. So, P.C. Ching, Y.T. Chan, An Improvement to the Explicit Time Delay Estimator, in Proceedings of the ICASSP, pp. 3151–3154 (1995)
S. Stein, Differential delay/Doppler ML estimation with unknown signals. IEEE Trans. Signal Process. 41(8), 2717–2719 (1993)
A.J. Weiss, Direct geolocation of wideband emitters based on delay and Doppler. IEEE Trans. Signal Process. 59(6), 2513–2521 (2011)
M. Wax, The joint estimation of differential delay, Doppler, and phase. IEEE Trans. Inf. theory 28(5), 817–820 (1982)
Y. Wang, K.C. Ho, TDOA source localization in the presence of synchronization clock bias and sensor position errors. IEEE Trans. Signal Process. 61(18), 4532–4544 (2013)
A. Yeredor, E. Angel, Joint TDOA and FDOA estimation: a conditional bound and its use for optimally weighted localization. IEEE Trans. Signal Process. 59(4), 1612–1623 (2011)
S. Zhong, W. Xia, J. Song, Z. He, Super-Resolution Time Delay Estimation in Multipath Environments Using Normalized Cross Spectrum, in Proceedings of the International Conference on Communications, Circuits and Systems, pp. 288–291 (2013)
S. Zhong, W. Xia, Z. He, Time Delay Estimation in the Presence of Clock Frequency Error, in Proceedings of the IEEE International Conference on Acoustic, Speech and Signal Processing (ICASSP), Florence, pp. 3001–3005 (2014)
S. Zhong, W. Xia, Z. He, Approximate Maximum Likelihood Time Differences Estimation in the Presence of Frequency and Phase Consistence Errors, in Proceedings of the IEEE Symposium on Signal Processing and Information Technology (ISSPIT), Athens, pp. 305–308 (2013)
Acknowledgments
This work was supported in part by the Natural Science Foundation of China (Grant No. 61101173). Dr. Wei Xia is currently on sabbatical leave with Stevens Institute of Technology, Hoboken, NJ 07030, USA, where he is a visiting scholar. He is currently a recipient of a scholarship under the State Scholarship Fund of the China Scholarship Council (CSC), and sponsored by the Oversea Academic Training Funds (OATF), University of Electronic Science and Technology of China (UESTC).
Author information
Authors and Affiliations
Corresponding authors
Appendices
Appendix 1: Derivation of the Objective Function
Maximizing the log value of the likelihood function given by (15) is equivalent to maximizing
with respect to \(\varvec{\theta }\). The second item on the right-hand side of (39) is independent of the unknown vector \(\varvec{\theta }\). In addition, invoking Assumption 5, we obtain
Further, according to (13), (14), and (40), the third term on the right-hand side of (39) may be rewritten as
That is, this term is unrelated to the unknown vector \(\varvec{\theta }\). Hence, the ML estimate seeks to maximize
After ignoring real constants a and \({\sigma }_{\mathrm{a}} ^{-2}\) in (42), maximizing \({\mathop {\mathfrak {R}}\nolimits } \{{\mathbf{x}}_{\mathrm{a}}^H {\mathbf{C}}_{\mathrm{a}}^{ - 1} {\mathbf{u}}_{\mathrm{a}}({\varvec{\theta }} )\}\) is equivalent to maximizing \({\mathop {\mathfrak {R}}\nolimits } \{ \hbox {e}^{j\varphi } {\mathbf{x}}_{\mathrm{a}}^H {\varvec{\Phi }} {\mathbf{s}}_{D,\beta } \}\). Hence, the objective function \(L_{\mathrm{a}}({D,\beta ,\varphi })\) is as given in (16).
Appendix 2: Derivation of the CRLB for an Active System
The FIM \({\mathbf{J}}_{\mathrm{a}}\) for the estimation of a vector of real-valued parameters \(\varvec{\theta }\) from the Gaussian vector \({\mathbf{x}}_{\mathrm{a}}\), when only the mean value \({\mathbf{u}}_{\mathrm{a}}\) depends on \(\varvec{\theta }\), is given by Kay [11]
where the Jacobian matrix \({\mathbf{G}}_{\mathrm{a}} ({\varvec{\theta }} )\) is defined as \({\mathbf{G}}_{\mathrm{a}}({\varvec{\theta }} ) \buildrel \varDelta \over = \frac{{\partial {{\mathbf{u}}_{\mathrm{a}}}({\varvec{\theta }} )}}{{\partial {\varvec{\theta }} }} \). With \([\cdot ]_{i,l}\) denoting the ith row and lth column element of the matrix, the matrix entries of \({\mathbf{G}}_{\mathrm{a}}^H {\mathbf{G}}_{\mathrm{a}}\) are given as
where
The vector \(\mathbf{n}\) and the \(N \times N\) unitary matrix \({\mathbf{F}}\) for the discrete Fourier transform are defined as
According to (46), the partial derivative may be obtained by taking the Fourier transform.Footnote 9
Clearly \({\mathop {\mathfrak {R}}\nolimits }\{[{\mathbf{G}}_{\mathrm{a}}^H {\mathbf{G}}_{\mathrm{a}}]_{3,4}\}=0\), and moreover that (see the proof in “Appendix 4”)
i.e.,
In addition, from the Hermiticity of \({\mathbf{G}}_\mathrm{a}^H {\mathbf{G}}_\mathrm{a}\), the matrix \({\mathbf{J}}_{\mathrm{a}}\) is given by
where \([{\mathbf{J}}_{\mathrm{a}}]_{1:3,1:3}\) denotes the upper-left \(3 \times 3\) block matrix of \({\mathbf{J}}_{\mathrm{a}}\). As
the CRLB on the unbiased estimation of \( {\varvec{\theta }}_1\buildrel \varDelta \over = [D,\beta , \varphi ]^\mathrm{T} \) is given by diagonal elements of the matrix \([{\mathbf{J}}_{\mathrm{a}}] ^{-1} _{1:3,1:3}\). Hence, the CRLBs on the estimates of D and \(\beta \) are given, respectively, by
with
where \(\gamma \), \(\kappa \) and \(\nu \) are defined, respectively, by
Appendix 3: Derivation of the CRLB for a Passive System
The FIM \({\mathbf{J}}_{\mathrm{p}}\) for the estimation of a real-valued parameter vector \(\varvec{\vartheta }\) from a Gaussian vector \({\mathbf{x}}_{\mathrm{p}}\), when only the mean \({\mathbf{u}}_{\mathrm{p}}\) depends on \(\varvec{\vartheta }\), is given by Kay [11]
From the derivative of \({\mathbf{u}}_{\mathrm{p}}\) with respect to \(\varvec{\vartheta }\), we get the \(2N \times (2N+4)\) Jacobian matrix
where \({\mathbf{u}}_{{\mathrm{p}},2} ({\varvec{\vartheta }} ) \buildrel \varDelta \over = a\hbox {e}^{j\varphi } {\varvec{\Phi }} {\mathbf{s}}_{D,\beta }\), and \(\mathbf{0}\) denotes the \(N \times 4\) null matrix. In addition, because \(\beta \) is usually small,Footnote 10 \({\mathbf{s}}_{D,\beta } \) approximates to the product
where the unitary matrix \({\mathbf{Q}}\) is defined as
with the diagonal matrix \({\varvec{\Phi }}_{\mathrm{D}}\) given by
and \(\mathbf{n}\) and \({\mathbf{F}}\) are defined by (47) and (48), respectively.
Hence, from the definitions of \({\mathbf{u}}_{{\mathrm{p}},2} ({\varvec{\vartheta }} )\) and (62), \({\frac{{\partial {\mathbf{u}}_{{\mathrm{p}},2} ({\varvec{\vartheta }} )}}{{\partial {\mathop {\mathfrak {R}}\nolimits } \{ {\mathbf{s}}\} }}}\) and \({\frac{{\partial {\mathbf{u}}_{{\mathrm{p}},2} ({\varvec{\vartheta }} )}}{{\partial {\mathop {\mathfrak {I}}\nolimits } \{ {\mathbf{s}}\} }}}\) may be approximated as
The Jacobian matrix \({\mathbf{H}}(\varvec{\vartheta })\), under the above approximations, is the same as the Jacobian matrix of the joint TDOA and FDOA estimation found in the literature [20]. Fortunately, we are only interested in the bound on the parameters \(\varvec{\theta }\) rather than \(\varvec{\vartheta }\). This bound is given by the lower-right \(4\times 4\) block of the inverse of \({\mathbf{J}}_{\mathrm{p}}\). Hence, as deduced in [20], the FIM corresponding to the unknown parameters \(\varvec{\theta }\) is given by
where \({\mathbf{G}}_{\mathrm{p}} \buildrel \varDelta \over = \frac{{\partial {\mathbf{u}}_{\mathrm{p},2} ({\varvec{\vartheta }} )}}{{\partial {\varvec{\theta }} }}\). It is obvious that \({\mathbf{G}}_{\mathrm{p}}\) is identical to \({\mathbf{G}}_{\mathrm{a}}\). Hence, \({\mathbf{G}}_{\mathrm{p}}^H {\mathbf{G}}_{\mathrm{p}}\) is identical to \({\mathbf{G}}_{\mathrm{a}}^H {\mathbf{G}}_{\mathrm{a}}\). Similar to the derivation for an active system, the CRLBs on the estimates of D and \(\beta \) in incoherent reception are given by
where \(\gamma \), \(\kappa \) and \(\nu \) are defined as for the active system, and \([{\mathbf{J}}_{\varvec{\theta } }]_{1:2:3,1:2:3}\) is similar to the definition (56), and \(\dot{\mathbf{s}}^H \dot{\mathbf{s}}\) may be given by
Note, \(\dot{\mathbf{s}}^H \dot{\mathbf{s}}\) denotes the energy of \(\dot{\mathbf{s}}\) defined in (46).Footnote 11
Appendix 4: Proof of (49) and (50)
According to (46), we obtain
where \(\mathbf{N}\) is defined by (45); i.e., \(\mathbf{N}\) is a diagonal matrix with real diagonal elements. Thus, \({{\dot{\mathbf{s}}}}^H {\mathbf{s}}_{D,\beta }\) is imaginary valued. Thus, (49) is proved.
From Assumption 5, we have
Therefore, (50) is proved.
Appendix 5: Proof of \(\gamma {{\dot{\mathbf{s}}}}^H {{\dot{\mathbf{s}}}} - \kappa \ge 0\)
The FIM \([{\mathbf{J}}_{\mathrm{a}}]_{1:3,1:3}\) may be decomposed as
where the \(3\times N\) matrix \(\mathbf{G}_{\mathrm{a}}\) is given by
Hence, \(\forall \mathbf{x} \ne 0\), where \(\mathbf{x}\) is an N-dimensional column vector, \(\exists {\mathbf{x}}^H {\mathbf{G}_{\mathrm{a}}} {\mathbf{G}}_{\mathrm{a}}^H {\mathbf{x}} = ( {\mathbf{G}}_{\mathrm{a}}^H {\mathbf{x}} )^H {\mathbf{G}}_{\mathrm{a}}^H {\mathbf{x}} \ge 0\). From (74), it is known that \([{\mathbf{J}}_{\mathrm{a}}]_{1:3,1:3}\) is a positive definite matrix. Therefore,
In addition, using (57) and (58), it follows that
Rights and permissions
About this article

Cite this article
Zhong, S., Xia, W. & He, Z. Joint Estimation of Time Delay and Clock Error in the Incoherent Reception Systems. Circuits Syst Signal Process 35, 3284–3309 (2016). https://doi.org/10.1007/s00034-015-0204-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-015-0204-4