
Abstract.
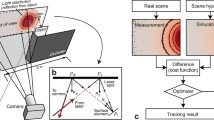
This paper describes a technique for tracking-based reconstruction from camera images. The position and orientation data are provided by a commercial laser tracker rigidly attached to the camera. The tracker enables the determination of the extrinsic camera parameters. Focal length is automatically calibrated in parallel with the depth computation process by means of a Kalman filter. In addition to its simplicity, our technique enables the fast generation of three-dimensional models from two-dimensional images to be used in virtual reality applications.
Similar content being viewed by others


References
Ayache N (1991) Artificial Vision for Mobile Robots. MIT Press, Cambridge, MA
Brown RG, Hwang P (1992) Introduction to random signals and applied kalman filtering. Wiley, New York
Chiu YC, Ahmad S (1989) Calibration of wrist-mounted robotic sensors by solving homogeneous transform equations of the form AX=XB. IEEE Trans Robot Automat 5:16-27
Faugeras OD (1992) What can be seen in three dimensions with an uncalibrated stereo rig? In: Proc. Computer Vision (ECCV’92), pp 563-578
Faugeras OD, Toscani G (1986) The calibration problem for stereo. In: Proc. CVPR’86, Miami Beach, FL, pp 15-20
Hartley R, Sturm P (1997) Triangulation. Comput Vis Image Understand 68:146-157
Jain R, Kasturi R, Schunck B (1995) Machine vision. McGraw-Hill, New York
Kalman RE (1960) A new approach to linear filtering and prediction problems. Trans ASME J Basic Eng Ser D 82:35-45
Lee K-S, Wong K-H, Fung Y-F (2001) 3D Face modeling from perspective-views and contour-based generic-model. Real-Time Imag 7:173-182
MacLeod E, Chiarella M (1993) Navigation and control breakthrough for automated mobility. In: Proc. 1993 SPIE conference on mobile robots, Boston, pp 57-68
Maybeck PS (1979) Stochastic models, estimation and control. Academic, New York
Mohr R, Arbogast E (1990) It can be done without camera calibration. Pattern Recog Lett 12:39-43
Park JH, Park HW (2003) Fast view interpolation of stereo images using image gradient and disparity triangulation. Signal Process Image Commun 18:401-416
Pollefeys M, Koch R, Vergauwen M, Van Gool L (2000) Automated reconstruction of 3D scenes from sequences of images. ISPRS J Photogrammet Remote Sens 55:251-267
Shashua A (1993) Projective depth: a geometric invariant for 3D reconstruction from two perspective/orthographic views and for visual recognition. In: Proc. IEEE international conference on computer vision, Berlin, pp 583-590
Sparr G (1991) An algebraic-analytic method for reconstruction from image correspondences. In: Proc. 7th Scandinavian conference on image analysis, pp 274-281
Tomasi C, Kanade T (1992) Shape and motion from image streams under orthography: a factorization method. Int J Comput Vis 9:137-154
Trucco E, Verri A (1998) Introductory techniques for 3D computer vision. Prentice Hall, Englewood Cliffs, NJ
Tsai R (1987) A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J Robot Automat RA-3(4):221-244
Tsai R, Lenz R (1989) A new technique for fully autonomous and efficient 3D robotics hand/eye calibration. IEEE Trans Robot Automat 5:345-358
Wang R-S, Wang Y (2000) Multiview video sequence asnalysis, compression, and virtual viewpoint synthesis. IEEE Trans Circuits Syst Video Technol 10(3):397-410
Zetu D, Banerjee P, Schneider P (1998) Data input model for virtual reality-aided facility layout design. IIE Trans 30:597-620
Zhang Z (1996) A new multistage approach to motion and structure estimation: from essential parameters to Euclidean motion via fundamental matrix. Technical report 2910, French National Institute for Research in Computer Science and Control (INRIA), Sophia-Antipolis, France
Zhang Z, Faugeras O (1992) 3D Dynamic scene analysis. Springer, Berlin Heidelberg New York
Zhang Z, Luong QT, Faugeras O (1996) Motion of an uncalibrated stereo rig: self-calibration and metric reconstruction. IEEE Trans Robot Automat 12(1):103-113
Zhang Z, Deriche R, Faugeras O, Luong Q (1994) A robust technique for matching two uncalibrated images through the recovery of the unknown epipolar geometry. Technical report 2273, French National Institute for Research in Computer Science and Control (INRIA), Sophia-Antipolis, France
Author information
Authors and Affiliations
Corresponding author
Additional information
Received: 16 August 2003, Revised: 13 August 2004, Published online: 20 December 2004
Correspondence to: Ali Akgunduz
Rights and permissions
About this article
Cite this article
Zetu, D., Akgunduz, A. Tracking-based depth recovery for virtual reality applications. Machine Vision and Applications 16, 122–127 (2005). https://doi.org/10.1007/s00138-004-0164-3
Issue Date:
DOI: https://doi.org/10.1007/s00138-004-0164-3