
Abstract
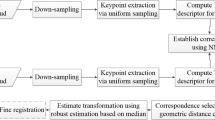
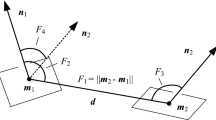
We propose a new feature-based registration method for rigid-body alignment of overlapping point clouds (PCs) efficiently under the influence of noise and outliers. The proposed registration method is independent of the initial position and orientation of PCs, and no assumption is necessary about their underlying geometry. In the process, we define a simple and efficient geometric descriptor, a novel k-NN search algorithm that outperforms most of the existing nearest neighbor search algorithms used for the same task, and a new algorithm to find corresponding points between PCs based on the invariance of Euclidian distance under rigid-body transformation.
Similar content being viewed by others

References
Akca, D.: Full automatic registration of laser scanner point clouds. In: Optical 3-D Measurement Techniques VI, pp. 330–337. Zurich (2003)
Arya, S., Mount, D.M., Netanyahu, N.S., Silverman, R., Wu, A.Y.: An optimal algorithm for approximate nearest neighbor searching fixed dimensions. J. ACM 45(6), 891–923 (1998). doi: http://doi.acm.org/10.1145/293347.293348, http://www.cs.umd.edu/∼mount/ANN
Besl, P.J., McKay, H.D.: A method for registration of 3-d shapes. IEEE Trans. Pattern Anal. Mach. Intell. 14(2), 239–256 (1992)
Bornaz, L., Lingua, A., Rinaudo, F.: A new software for the automatic registration of 3d digital models acquired using laser scanner devices. In: CIPA WG6 International Workshop on Scanning for Cultural Heritage Recording, pp. 52–57. Corfù (2002)
Chen, C.-S., Hung, Y.-P., Cheng, J.-B.: RANSAC-based DARCES: A new approach to fast automatic registration of partially overlapping range images. IEEE Trans. Pattern Anal. Mach. Intell. 21(11), 1229–1234 (1999)
Dorai, C., Wang, G., Jain, A.K., Mercer, C.: Registration and integration of multiple object views for 3d model construction. IEEE Trans. Pattern Anal. Mach. Intell. 20(1), 83–89 (1998)
Frome, A., Huber, D., Kolluri, R., Bulow, T., Malik, J.: Recognizing objects in range data using regional point descriptors. In: European Conference on Computer Vision (ECCV), pp. 224–237. Springer, Prague (2004)
Funkhouser, T., Kazhdan, M., Min, P., Shilane, P.: Shape-based retrieval and analysis of 3D models. Commun. ACM 48(6), 58–64 (2005)
Garland, M.: QSlim: Simplification Software. http://graphics.cs.uiuc.edu/∼garland/software/qslim.html
Gelfand, N., Mitra, N.J., Guibas, L.J., Pottmann, H.: Robust global registration. In: Desbrun, M., Pottmann, H. (eds.) Proceedings of the Third Eurographics Symposium on Geometry Processing (Vienna, Austria, 2005), ACM Int. Conf. Proc. Ser., vol. 255, pp. 197–206. Eurographics Association, Aire-la-Ville (2005)
Johnson, A.E., Hebert, M.: Using spin images for efficient object recognition in cluttered 3d scenes. IEEE Trans. Pattern Anal. Mach. Intell. 21(5), 433–449 (1999)
Liu, Y., Rodrigues, M.A., Qian, W.: Using neighboring relationships to eliminate false matches for accurate registration of free-form surfaces. J. Digital Imaging 15(1), 267–269 (2002)
Mitra, N.J., Nguyen, A.: Estimating surface normals in noisy point cloud data. In: SCG ’03: Proceedings of the Nineteenth Annual Symposium on Computational Geometry, pp. 322–328. ACM, New York, NY (2003)
Nene, S.A., Nayar, S.K.: A simple algorithm for nearest neighbor search in high dimensions. IEEE Trans. Pattern Anal. Mach. Intell. 19(9), 989–1003 (1997). doi: http://dx.doi.org/10.1109/34.615448
Pauly, M., Gross, M., Kobbelt, L.P.: Efficient simplification of point-sampled surfaces. In: Proceedings of the IEEE Conference on Visualization, pp. 163–170. IEEE Computer Society, Boston, MA (2002)
Pauly, M., Keiser, R., Gross, M.H.: Multi-scale feature extraction on point-sampled surfaces. Comput. Graph. Forum 22(3), 281–290 (2003)
Roth, G.: Registering two overlapping range images. In: Proceedings of the Second International Conference on 3-D Digital Imaging and Modeling, pp. 191–200. IEEE, Ottawa (1999)
Turk, G., Mullins, B.: Large geometric models archive. http://www.cc.gatech.edu/projects/large_models/
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Basdogan, C., Oztireli, A. A new feature-based method for robust and efficient rigid-body registration of overlapping point clouds. Visual Comput 24, 679–688 (2008). https://doi.org/10.1007/s00371-008-0248-6
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00371-008-0248-6