
Abstract
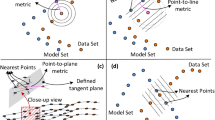
Methods based on distance error metrics, such as the iterative closest point (ICP) algorithm and its variants, do not efficiently register noisy point clouds. In this paper, we propose a novel method for registering noisy point clouds by extending the ICP algorithm. The proposed method, which is based on higher-dimensional error metrics minimization, has two variants: One variant is based on area error metric, and the other is based on volume error metric. For the registration of point clouds, triangles or tetrahedrons are constructed between the point clouds by using an optimal vertices selection algorithm. To reduce computational complexity, the method is linearized by assuming that the rotation angle is small. The main advantage of the proposed method is its robustness for the registration of noisy point clouds. In particular, the volume minimization-based registration variant exhibits good robustness in the presence of strong noise. The proposed method was compared with the variants of ICP algorithm in experiments conducted on many types of point clouds, such as noisy point clouds with different noise levels. The experimental results obtained show that the robustness of the registration is increased by using higher-dimensional error metrics.









Similar content being viewed by others

References
Amamra, A., Aouf, N., Stuart, D., Richardson, M.: A recursive robust filtering approach for 3D registration. Signal Image Video Process. 10(5), 835–842 (2016)
Besl, P.J., McKay, N.D.: A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 14(2), 239–256 (1992)
Boughorbel, F., Koschan, A., Abidi, B., Abidi, M.: Gaussian fields: a new criterion for 3D rigid registration. Pattern Recogn. 37(7), 1567–1571 (2014)
Boughorbel, F., Mercimek, M., Koschan, A., Abidi, M.: A new method for the registration of three-dimensional point-sets: the Gaussian fields framework. Image Vis. Comput. 28(1), 124–137 (2010)
Censi, A.: An ICP variant using a point-to-line metric. In: IEEE International Conference on Robotics and Automation, ICRA 2008, pp. 19–25 (2008)
Chen, Y., Medioni, G.: Object modeling by registration of multiple range images. Image Vis. Comput. 10(3), 145–155 (1992)
Deng, W., Zou, H., Guo, F., Lei, L., Zhou, S.: Point-pattern matching based on point pair local topology and probabilistic relaxation labeling. Vis. Comput. 34(1), 55–65 (2016)
Diez, Y., Roure, F., Llad, X., Salvi, J.: A qualitative review on 3d coarse registration methods. ACM Comput. Surv. (CSUR) 47(3), 45:1–45:36 (2015)
Fitzgibbon, A.W.: Robust registration of 2D and 3D point sets. Image Vis. Comput. 21(13), 1145–1153 (2003)
Gelfand, N., Ikemoto, L., Rusinkiewicz, S., Levoy, M.: Geometrically stable sampling for the ICP algorithm. In: Fourth International Conference on 3-D Digital Imaging and Modeling, pp. 260–267 (2003)
Granger, S., Pennec, X.: Multi-scale EM-ICP: a fast and robust approach for surface registration. In: European Conference on Computer Vision, pp. 418–432 (2002)
Guo, Y., Sohel, F., Bennamoun, M., Wan, J., Lu, M.: An accurate and robust range image registration algorithm for 3D object modeling. IEEE Trans. Multimed. 16(5), 1377–1390 (2014)
Holz, D., Ichim, A.E., Tombari, F., Rusu, R.B., Behnke, S.: Registration with the point cloud library: a modular framework for aligning in 3-D. IEEE Robot. Autom. Mag. 22(4), 110–124 (2015)
Jian, B., Vemuri, B.C.: Robust point set registration using Gaussian mixture models. IEEE Trans. Pattern Anal. Mach. Intell. 33(8), 1633–1645 (2011)
Low, K.L.: Linear Least-Squares Optimization for Point-to-Plane ICP Surface Registration, p. 4. University of North Carolina, Chapel Hill (2004)
Marani, R., Ren, V., Nitti, M., D’Orazio, T., Stella, E.: A modified iterative closest point algorithm for 3D point cloud registration. Comput. Aided Civ. Infrastruct. Eng. 31(7), 515–534 (2016)
Mellado, N., Dellepiane, M., Scopigno, R.: Relative scale estimation and 3D registration of multi-modal geometry using growing least squares. IEEE Trans. Vis. Comput. Graph. 22(9), 2160–2173 (2016)
Mitra, N.J., Gelfand, N., Pottmann, H., Guibas, L.: Registration of point cloud data from a geometric optimization perspective. In: Proceedings of the 2004 Eurographics/ACM SIGGRAPH Symposium on Geometry Processing, pp. 22–31 (2004)
Nagarajan, S.: Registration of free-form lines and surfaces using area and volume minimization. Doctoral dissertation, The Ohio State University (2010)
Pauly, M., Keiser, R., Gross, M.: Multi-scale feature extraction on point-sampled surfaces. Comput. Graph. Forum 22, 281–289 (2003)
Pottmann, H., Huang, Q.X., Yang, Y.L., Hu, S.M.: Geometry and convergence analysis of algorithms for registration of 3D shapes. Int. J. Comput. Vis. 67(3), 277–296 (2006)
Rusinkiewicz, S., Levoy, M.: Efficient variants of the ICP algorithm. In: Third International Conference on 3-D Digital Imaging and Modeling, Proceedings, pp. 145–152 (2001)
Rusu, R.B., Blodow, N., Beetz, M.: Fast point feature histograms (FPFH) for 3D registration. In: IEEE International Conference on Robotics and Automation, 2009. ICRA’09. IEEE, pp. 3212–3217 (2009)
Salvi, J., Matabosch, C., Fofi, D., Forest, J.: A review of recent range image registration methods with accuracy evaluation. Image Vis. Comput. 25(5), 578–596 (2007)
Sandhu, R., Dambreville, S., Tannenbaum, A.: Particle filtering for registration of 2D and 3D point sets with stochastic dynamics. In: IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2008, pp. 1–8 (2008)
Segal, A., Haehnel, D., Thrun, S.: Generalized-ICP. Robot. Sci. Syst. 2(4) (2009)
Tam, G.K., Cheng, Z.Q., Lai, Y.K., Langbein, F.C., Liu, Y., Marshall, D., Martin, R.R., Sun, X.F., Rosin, P.L.: Registration of 3D point clouds and meshes: a survey from rigid to nonrigid. IEEE Trans. Vis. Comput. Graph. 19(7), 1199–1217 (2013)
Yang, J., Cao, Z., Zhang, Q.: A fast and robust local descriptor for 3D point cloud registration. Inf. Sci. 346, 163–179 (2016)
Yang, J., Li, H., Campbell, D., Jia, Y.: Go-ICP: a globally optimal solution to 3D ICP point-set registration. IEEE Trans. Pattern Anal. Mach. Intell. 38(11), 2241–2254 (2016)
Zhong, Y.: Intrinsic shape signatures: a shape descriptor for 3D object recognition. In: 2009 IEEE 12th International Conference Computer Vision Workshops (ICCV Workshops), pp. 689–696 (2009)
Acknowledgements
Parts of this work were supported by MJEED Grant JR14B16, JSPS KAKENHI Grant JP15H02945, and National University of Mongolia through the Innovation Grant P2017-1031.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Funding
This study was funded by MJEED (Grant JR14B16), JSPS KAKENHI (Grant JP15H02945), and National University of Mongolia (Innovation Grant P2017-1031).
Conflict of interest
E. Altantseteseg, O. Khorloo, K. Konno state that there are no conflicts of interest.
Rights and permissions
About this article

Cite this article
Altantsetseg, E., Khorloo, O. & Konno, K. Rigid registration of noisy point clouds based on higher-dimensional error metrics. Vis Comput 34, 1021–1030 (2018). https://doi.org/10.1007/s00371-018-1534-6
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00371-018-1534-6