
Abstract.
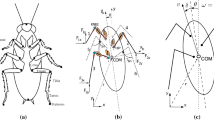
We study the dynamics and stability of legged locomotion in the horizontal plane. We discuss the relevance of idealized mechanical models, developed in a companion paper, to recent experiments and simulations on insect running and turning. Applying our results to rapidly running cockroaches, we show that the models' gait and force characteristics match observations reasonably well.
Similar content being viewed by others


Author information
Authors and Affiliations
Additional information
Received: 6 September 1999 / Accepted in revised form: 8 May 2000
Rights and permissions
About this article
Cite this article
Schmitt, J., Holmes, P. Mechanical models for insect locomotion: dynamics and stability in the horizontal plane – II. Application. Biol Cybern 83, 517–527 (2000). https://doi.org/10.1007/s004220000180
Issue Date:
DOI: https://doi.org/10.1007/s004220000180