
Abstract
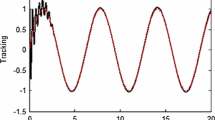
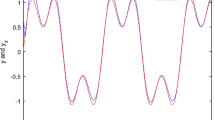
For a class of large-scale decentralized nonlinear systems with strong interconnections, a radial basis function neural network (RBFN) adaptive control scheme is proposed. The system is composed of a class of non-affine nonlinear subsystems, which are implicit function and smooth with respect to control input. Based on implicit function theorem, inverse function theorem and the design idea of pseudo-control, a novel control algorithm is proposed. Two neural networks are used to approximate unknown nonlinearities in the subsystem and unknown interconnection function, respectively. The stability is proved rigidly. The result of simulation validates the effectiveness of the proposed scheme.






Similar content being viewed by others

References
Spooner JT, Passino KM (1996) Adaptive control of a class of decentralized nonlinear system. IEEE Trans Automat Control 41(2):280–284
Siljak DD (1985) Decentralized control of complex systems. Academic, Boston
Ioannou PA (1986) Decentralized adaptive control of interconnected systems. IEEE Trans Automat Control AC-31:291–298
Fu LC (1992) Robust adaptive decentralized control of robot manipulators. Automatic Control IEEE Trans 37:106–110
Sheikholeslam S, Desor CA (1993) Indirect adaptive control of a class of interconnected nonlinear dynamical systems. Int J Control 57(3):742–765
Wen C (1994) Decentralized adaptive regulation. IEEE Trans Automat Control 39:2163–2166
Tang Y, Tomizuka M, Guerrero G (2000) Decentralized robust control of mechanical systems. IEEE Trans Automat Control 45(4):2163–2166
Huang SN, Shao HH (1995) Robust stability analysis of uncertain large-scale systems. Control Comput 23(1):1–5
Seraji H (1989) Decentralized adaptive control of manipulators: theory, simulation, and experimentation. IEEE Trans Robot Automat 5:183–201
Huang SN, Shao HH (1995) Stability analysis of large-scale systems with delays. Syst Control Lett 25:75–78
Lewis FL, Yesildirek A, Liu K (1996) Multilayer neural-net robot controller with guaranteed tracking performance. IEEE Trans Neural Netw 7(2):388–399
Yesildirek A, Lewis FL (1995) Feedback linearization using neural networks. Automatica 3(11):1659–1664
Calise AJ, Hovakimyan N (2001) Adaptive output feedback control of nonlinear system using neural networks. Automatica 37:1201–1211
Johnson E, Calise AJ (2000) Feedback linearization with neural network augmentation applied to X-33 attitude control. Guidance Navigation and Control Conference, AIAA-2000-4157
Ge SS, Huang CC (1997) Direct adaptive neural network control of nonlinear systems. In: Proceedings of the American Control conference, Albuqerque, New Mexico, pp 1568–1572
Ge SS, Huang CC (1999) Adaptive neural network control of nonlinear systems by state and output feedback. IEEE Trans Syst Man Cybern B 29(6):818–828
Zhang T, Ge SS, Hang CC (1999) Design and performance analysis of a direct controller for nonlinear systems. Automatica 35:1809–1817
Zhang T, Ge SS, Hang CC (1997) Neural-based direct adaptive control for a class of general nonlinear systems. Int J Syst Sci 28:1011–1020
Spooner JT, Passino KM (1999) Decentralized adaptive control of nonlinear systems using radial basis neural networks. Trans Automat Control 44(11):2050–2057
Huang S, Tan KK (2003) Decentralized control design for large-scale systems with strong interconnections using neural networks. IEEE Trans Automa Control 48(5):805–810
Johnson E, Calise AJ (2000) Feedback linearization with Neural network augmentation applied to X-33 attitude control. Guidance navigation and control conference,AIAA-2000-4157
Huang SN, Tan KK (2006) Nonlinear adaptive control of interconnected systems using neural networks. IEEE Trans Neural Netw 17(1):243–246
Nardi F, Hovakimyan N (2006) Decentralized control of large-scale systems using single hidden layer neural networks. In: Proceedings of the American control conference,Arilington, June 2001, pp 3123–3127
Huang SN, Tan KK (2005) Decentralized control of a class of large-scale nonlinear systems using neural networks. Automatica 41:1645–1649
Lang S (1983) Real analysis. Addison-Wesley, Reading
Slotine JJE, Li WP (1991) Applied nonlinear control. Prentice Hall, Englewood Cliffs
Polycarpou MM (1996) Stable adaptive neural control scheme for nonlinear system. IEEE Tran Autom Control 41(3):447–451
Girosi F, Poggio T (1989) Networks and the best approximation property. Artif Intell Lab Memo 1164 Mass Inst Technol, Cambridge
Gupta MM, Rao DH (1996) Neural-control system: theory and applications. IEEE Neural Netw Council N Y 41(3):447–451
Acknowledgments
This research is supported by the research fund granted by the Doctoral Foundation of Qingdao University of Science and Technology.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zhao, T. RBFN-based decentralized adaptive control of a class of large-scale non-affine nonlinear systems. Neural Comput & Applic 17, 357–364 (2008). https://doi.org/10.1007/s00521-007-0125-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-007-0125-7