
Abstract
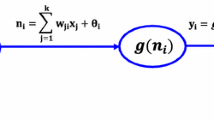
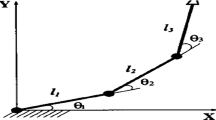
Golf swing robots have been recently developed in an attempt to simulate the ultra high-speed swing motions of golfers. Accurate identification of a golf swing robot is an important and challenging research topic, which has been regarded as a fundamental basis in the motion analysis and control of the robots. But there have been few studies conducted on the golf swing robot identification, and comparative analyses using different kinds of soft computing methodologies have not been found in the literature. This paper investigates the identification of a golf swing robot based on four kinds of soft computing methods, including feedforward neural networks (FFNN), dynamic recurrent neural networks (DRNN), fuzzy neural networks (FNN) and dynamic recurrent fuzzy neural networks (DRFNN). The performance comparison is evaluated based on three sets of swing trajectory data with different boundary conditions. The sensitivity of the results to the changes in system structure and learning rate is also investigated. The results suggest that both FNN and DRFNN can be used as a soft computing method to identify a golf robot more accurately than FFNN and DRNN, which can be used in the motion control of the robot.














Similar content being viewed by others
References
Suzuki S, Inooka H (1998) A new golf-swing robot model utilizing shaft elasticity. J Sound Vib 217(1):17–31
Ming A, Kajitani M (2003) A new golf swing robot to simulate human skill-accuracy improvement of swing motion by learning control. Mechatronics 13:809–823
Ming A, Furukawa S, Teshima T, Shimojo M, Kajitani M (2006) A new golf swing robot to simulate human skill-learning control based on direct dynamics model using recurrent ANN. Mechatronics 16:443–449
Hoshino Y, Kobayashi Y, Yamada G (2005) Vibration control using a state observer that considers disturbance of a golf swing robot. JSME Int J Control 48(1):60–69
Chen CC, Inoue Y, Shibata K (2008) Impedance control for a golf swing robot to emulate different-arm-mass golfers. J Dyn Syst-Trans ASME 130(2):1–8 021007
Theodore RJ, Ghosal A (1995) Comparison of the assumed modes and finite element models for flexible multi-link manipulators. Int J Robotic Res 14(2):91–111
De Luca A, Siciliano B (1991) Closed-form dynamic model of planar multilink lightweight robots. IEEE Trans Syst Man Cybern 21(4):826–839
Onder Efe M, Kaynak O (2000) A comparative study of soft-computing methodologies in identification of robotic manipulators. Robot Auton Syst 30:221–230
Becerikli Y (2004) On three intelligent systems: dynamic neural, fuzzy, and wavelet networks for training trajectory. Neural Comput Appl 13:339–351
Bernd T, Kleutges M, Kroll A (1999) Nonlinear black box modeling—fuzzy networks versus neural networks. Neural Comput Appl 8:151–162
Lin C-T, Lee CSG (1996) Neural fuzzy systems. Prentice-Hall PTR, Upper Saddle River
Jang J-SR, Sun C-T, Mizutani E (1997) Neuro-fuzzy and soft computing. Prentice-Hall PTR, Upper Saddle River
Narendra KS, Parthasarathy K (1990) Identification and control of dynamical systems using neural networks. IEEE Trans Neural Netw 1:4–27
Tian L, Collins C (2004) A dynamic recurrent neural-network-based controller for a rigid-flexible manipulator system. Mechatronics 14:471–490
Chen YC, Teng C-C (1995) A model reference control structure using a fuzzy neural network. Fuzzy Set Syst 73:291–312
Lee C-H, Teng C-C (2000) Identification and control of dynamic systems using recurrent fuzzy neural networks. IEEE Trans Fuzzy Syst 8(4):349–366
Lin C-J, Chen C-H (2005) Identification and prediction using recurrent compensatory neuro-fuzzy systems. Fuzzy Set Syst 150:307–330
Werbos PJ (1990) Backpropagation through time: what it does and how to do it. Procee IEEE 78(10):1550–1560
Xu C, Ming A, Nagaoka T (2009) Motion control of a golf swing robot. J Intell Robot Syst 56:277–299
MacKenzie SJ, Sprigings EJ (2009) A three-dimensional forward dynamics model of the golf swing. Sports Eng 11:165–175
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Chen, C., Inoue, Y. & Shibata, K. Identification of a golf swing robot using soft computing approach. Neural Comput & Applic 20, 729–740 (2011). https://doi.org/10.1007/s00521-010-0417-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-010-0417-1