
Abstract
This paper illustrates the application of an adaptive flight control architecture to a scale quad-rotor. For autonomous vertical takeoff and landing flight, it is common to separate the control problem into an inner fast loop that controls attitude and an outer slow loop that controls the trajectory tracking. In this paper, we augment a conventional proportional and derivative controller conceived mainly for hovering, with an adaptive element using a real-time tuning single hidden layer neural network in a inner–outer loop combined architecture to account for model inversion error cancelation, issued in the feedback linearization process. The results shown in simulations reveal the superior performance of the augmented controller in tracking maneuvers.










Similar content being viewed by others

References
Bouabdallah S, Siegwart R (2008) Design and control of a miniature quadrotor. In: Valavanis KP (ed) Advances in unmanned aerial vehicles. State of the art and the road to autonomy. Springer, pp 171–210. ISBN:978-1-4020-6113-4 (Print), 978-1-4020-6114-1 (Online)
Bouadi H, Simoes Cunha S, Drouin A, Mora-Camino F (2011) Adaptive sliding mode control for quadrotor attitude stabilization and altitude tracking. In: 12th IEEE international symposium on computational intelligence and informatics. Budapest, Hungary, pp 449–455
Castillo P, Lozano R, Dzul AE (2005) Modeling and control of mini-flying machines. Springer, London
Fang Z, Gao W (2011) Adaptive integral backstepping control of a micro-quadrotor. In: The 2nd international conference on intelligent control and information processing. Harbin, China, pp 910–915
Hornik K, Stinchcombe M, White H (1989) Multilayer feedforward networks are universal approximators. IEEE Trans Neural Netw 2:359–366
Isidori A (1995) Nonlinear control systems. Springer, London
Johnson EN (2000) Limited Authority Adaptive Flight Control. Ph. D. thesis. Georgia Institute of Technology, USA
Kannan SK, Johnson EN (2002) Adaptive flight control for an autonomous unmanned helicopter. In: AIAA guidance, navigation, and control conference and exhibit. Monterrey, USA
Kim N (2003) Improved methods in neural network based adaptive output feedback control, with applications to flight control. Ph. D. thesis. Georgia Institute of Technology, USA
Kim N, Calise AJ (2007) Neural network based adaptive output feedback augmentation of existing controllers. Aerosp Sci Technol 12:248–255
Nardi F (2000) Neural Network Based Adaptive Algorithms for Nonlinear Control—Ph. D. thesis. Georgia Institute of Technology, USA
Nicol C, Macnab CJB, Ramirez-Serrano A (2011) Robust adaptive control of a quadrotor helicopter. Mechatronics 21(6):927–938
Salazar-Cruz S, Palomino A, Lozano R (2005) Trajectory tracking for a four rotor mini-aircraft. In: 44th conf. on decision and control, Seville, Spain, pp 1354–1363
Schreier M (2012) Modeling and adaptive control of a quadrotor. In: Proceedings of 2012 IEEE international conference on mechatronics and automation. Chengdu, China, pp 383–390
Shin Y (2005) Neural Network Based Adaptive Control for Nonlinear Dynamic Regimes. Ph. D. Thesis. Georgia Institute of Technology, USA
Zhang X, Liu X (2010) Nonlinear internal model based attitude tracking and disturbance rejection of rigid spacecraft. In: IEEE international conference on intelligent computing and intelligent systems (ICIS), pp 711–715
Acknowledgments
This work was supported by the Spanish Ministry of Science and Education, grant DPI-2010-20466-C02-01.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
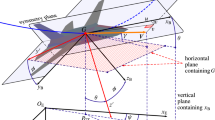
This section details the transformations associated with operations involving quaternions and rotation matrices. We shall adopt as the basis of the transformations the rotation matrix known as E 123 and as quaternion structure q = {q 0, q 1, q 2, q 3}. Defining
Thus \(E_{123} = {\hbox {Roll}}[\phi]\cdot {\hbox {Pitch}}[\theta]\cdot {\hbox {Yaw}}[\psi].\) So the rotation matrix is
The quaternion product of p and q gives
For unitary quaternions, q −1 = {q 0, − q 1, − q 2, − q 3 } so
The conversion transformations between E 123(ϕ, θ, ψ) and q are
and the inverse \(q \longrightarrow E_{123}\)
Also, the rotation matrix associated to a quaternion p is
Rights and permissions
About this article
Cite this article
Raimúndez, C., Camaño, J.L. Tracking in scale quad-rotors through adaptive augmentation. Neural Comput & Applic 23, 635–643 (2013). https://doi.org/10.1007/s00521-013-1425-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-013-1425-8