
Abstract
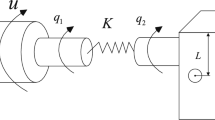
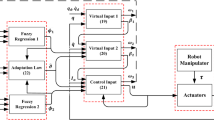
This paper deals with the problem of adaptive fuzzy tracking control for a single-link robotic manipulator coupled to a brushed direct current motor with actuator saturation. Fuzzy logic systems are used to approximate the unknown nonlinear systems. The filtered signals are introduced to eliminate the interference of high-frequency signals. The virtual/actual control inputs are derived from the solutions of a series of dynamical equations. Under the framework of the backstepping control design, an observer-based output feedback control design scheme is proposed. It is proved that the control approach can guarantee that all the signals in the closed-loop system are bounded.











Similar content being viewed by others
References
Cheng WS (2015) Neural-fuzzy control of a flexible dynamic tracking and adjusting manipulator. Transact Inst Meas Control 37(7):883–891
Fateh MM, Souzanchikashani M (2015) Indirect adaptive fuzzy control for flexible-joint robot manipulators using voltage control strategy. J Intell Fuzzy Syst 28(3):1451–1459
Soltanpour MR, Otadolajam P, Khooban MH (2015) Robust control strategy for electrically driven robot manipulators: adaptive fuzzy sliding mode. IET Sci Meas Technol 9(3):322–334
Yang HJ, Yu Y, Yuan Y, Fan XZ (2015) Back-stepping control of two-link flexible manipulator based on an extended state observer. Adv Space Res 56(3):2312–2322
Dawson DM, Hu J, Burg TC (1998) Nonlinear control of electric machinery. Marcel Dekker, New York
Tarn TJ, Bejczy AK, Yun X, Li Z (1991) Effect of motor dynamics on nonlinear feedback robot arm control. IEEE Trans Robot Autom 7(1):114–121
Liu XJ, Liu H, Xiang W (2012) Backstepping control for a class of nonlinear systems with input saturation. J Inf Comput Sci 9(16):4763–4768
Wen C, Zhou J, Liu Z, Su H (2011) Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance. IEEE Trans Autom Control 56(7):1672–1678
Ahn CK, Shi P, Basin MV (2015) Two-dimensional dissipative control and filtering for roesser model. IEEE Trans Autom Control 60(7):1745–1759
Chang WJ, Shi YJ (2015) Fuzzy control of multiplicative noised nonlinear systems subject to actuator saturation and H ∞ performance constraints. Neurocomputing 148:512–520
Kim DW (2015) Tracking of REMUS autonomous underwater vehicles with actuator saturations. Automatica 58:15–21
Lu K, Xia Y, Yu C, Liu H (2016) Finite-Time tracking control of rigid spacecraft under actuator saturations and faults. IEEE Trans Autom Sci Eng 13(1):368–381
Sun L, Wang Y, Feng G (2015) Control design for a class of affine nonlinear descriptor systems with actuator saturation. IEEE Trans Autom Control 60(8):2195–2200
Su Y, Swevers J (2014) Finite-time tracking control for robot manipulators with actuator saturation. Robot Comput Integr Manuf 30(2):91–98
Mayne DQ, Rawlings JB, Rao CV, Scokaert POM (2000) Constrained model predictive control: stability and optimality. Automatica 36(6):789–814
Bemporad A (1998) Reference governor for constrained nonlinear systems. IEEE Trans Autom Control 43(3):415–419
Gilbert EG, Ong CJ (2009) An extended command governor for constrained linear systems with disturbances. In: Proceedings of the 48th IEEE conference on decision and control, IEEE, Shanghai, pp 6929–6934
Hu T, Lin Z (2001) Control systems with actuator saturation: analysis and Design. Birkhäuser, Boston
Liu D, Michel AN (1994) Dynamical systems with saturation nonlinearities. Springer, London
Sun W, Yeow JTW, Sun Z (2012) Robust adaptive control of a one degree of freedom electrostatic micro electromechanical systems model with output-error-constrained tracking. IET Control Theory Appl 6(1):111–119
Tee KP, Ge SS, Tay EH (2009) Adaptive control of electrostatic micro-actuator with bidirectional drive. IEEE Trans Control Syst Technol 17(2):340–352
Tee KP, Ge SS, Tay EH (2009) Barrier Lyapunov functions for the output-constrained nonlinear systems. Automatica 45(4):918–927
Li YM, Tong SC, Li TS (2013) Adaptive fuzzy output feedback control for a single-link flexible robot manipulator driven DC motor via backstepping. Nonlinear Anal Real World Appl 14(1):483–494
Tong SC, Li YM, Shi P (2012) Observer-based adaptive fuzzy backstepping output feedback control of uncertain MIMO pure-feedback nonlinear systems. IEEE Trans Fuzzy Syst 20(4):771–785
Li YM, Tong SC (2014) Adaptive fuzzy output-feedback control of pure-feedback uncertain nonlinear systems with unknown dead zone. IEEE Trans Fuzzy Syst 22(5):1341–1347
Wen C, Zhou J, Liu Z, Su H (2011) Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance. IEEE Trans Autom Control 56(7):1672–1678
Zhou J, Er MJ, Zhou Y (2006) Adaptive neural network control of uncertain nonlinear systems in the presence of input saturation, International conference on control, automation, robotics and vision, IEEE, Singapore, pp 1–5
Ren B, Ge SS, Tee KP, Lee TH (2010) Adaptive neural control for output feedback nonlinear systems using a barrier Lyapunov function. IEEE Transactions on neural network 21(8):1339–1345
Li HY, Chen ZR, Sun YY, Karimi HR (2015) Stabilization for a class of nonlinear networked control systems via polynomial fuzzy model approach. Complexity 21(2):74–81
Bouzeriba A, Boulkroune A, Bouden T (2016) Projective synchronization of two different fractional-order chaotic systems via adaptive fuzzy control. Neural Comput Appl 27(5):1349–1360
Wang HQ, Yang XB, Yu ZD, Liu KF, Liu XP (2015) Fuzzy-approximation-based decentralized adaptive control for pure-feedback large-scale nonlinear systems with time-delay. Neural Comput Appl 26(1):151–160
Pan YP, Er MJ, Huang DP, Wang QR (2011) Adaptive fuzzy control with guaranteed convergence of optimal approximation error. IEEE Trans Fuzzy Syst 19(5):807–818
Deng H, Krstić M (1999) Output-feedback stochastic nonlinear stabilization. IEEE Trans Autom Control 44(2):328–333
Pan YP, Er MJ, Chen RJ, Yu HY (2015) Output feedback adaptive neural control without seeking SPR condition. Asian J Control 17(5):1620–1630
Pan YP, Sun TR, Yu HY (2015) Peaking-free output-feedback adaptive neural control under a nonseparation principle. IEEE Trans Neural Netw Learn Syst 26(12):3097–3108
Lee TH, Park MJ, Park JH, Kwon OM, Lee SM (2014) Extended dissipative analysis for neural networks with time-varying delays. IEEE Trans Neural Netw Learn Syst 25(10):1936–1941
Ahn CK, Wu LG, Shi P (2016) Stochastic stability analysis for 2-D roesser systems with multiplicative noise. Automatica 69:356–363
Li H, Wang J, Lam HK, Zhou Q, Du H, Adaptive sliding mode control for interval type-2 fuzzy systems. IEEE Trans Syst Man Cybern Syst
Li H, Chen Z, Wu L, Lam HK, Du H (2016) Event-triggered fault detection of nonlinear networked systems. IEEE Trans Cybern. doi:10.1109/TCYB.2016.2536750
Peng ZH, Wang D, Wang H, Wang W (2014) Coordinated formation pattern control of multiple marine surface vehicles with model uncertainty and time-varying ocean currents. Neural Comput Appl 25(7–8):1771–1783
Gao SG, Ning B, Dong HR (2015) Adaptive neural control with intercepted adaptation for time-delay saturated nonlinear systems. Neural Comput Appl 26(8):1849–1857
Yu ZX, Li SG, Du HB (2014) Adaptive neural output feedback control for stochastic nonlinear time-delay systems with unknown control directions. Neural Comput Appl 25(7–8):1979–1992
Ahn CK, Shi P, Wu LG (2015) Receding horizon stabilization an disturbance attenuation or neural networks with time-varying delay. IEEE Trans Cybern 45(12):2680–2692
Ahn CK (2014) l 2 − l ∞ Suppression of limit cycles in interfered two-dimensional digital filters: a Fornasini–Marchesini model case. IEEE Trans Circuits Syst II Express Briefs 61(8):614–618
Xie XP, Yue D, Zhang HG, Xue YS (2015) Control synthesis of discretetime T-S fuzzy systems via a multi-instant homogenous polynomial approach. IEEE Trans Cybern 46(3):630–640
Ma ZY, Tong SC, Li YM (2016) Fuzzy adaptive state-feedback fault-tolerant control for switched stochastic nonlinear systems with faults. Neurocomputing 186:35–43
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Nos. 61573175, 61374113).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Chang, W., Tong, S. & Li, Y. Adaptive fuzzy backstepping output constraint control of flexible manipulator with actuator saturation. Neural Comput & Applic 28 (Suppl 1), 1165–1175 (2017). https://doi.org/10.1007/s00521-016-2425-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-016-2425-2