
Abstract
The brushless DC (BLDC) motor is a widely used method of powering various active exoskeletons such as waist exoskeleton devices. In this study, an affordable three-phase BLDC motor was designed using three 120° Hall-effect sensors to actuate an active waist exoskeleton. The fault in a Hall-effect sensor may cause the system failure. Thus, taking safety measures for the operating BLDC is a very important aspect for the device. This paper presents a model-based single-phase fault-tolerant control as a safety measure that is able to estimate speed and signal delay for Hall-effect sensors of BLDC motors used in the active waist exoskeleton. Because of motor inertia that resists changing rotational speed, the exoskeleton controller can estimate the time interval of the signal edge between the fault Hall-effect sensor and its adjacent sensor based on the sampled values of the average speed at the previous motor status. The signal delay can be used to reconstruct the faulty Hall signals. Then, the rotor position and velocity information can be corrected in time to restore the motor operation. The BLDC motor along with the controller was modeled, and a simulation was conducted to evaluate the effectiveness of the control strategy. The result showed that the fault-tolerant control could rapidly reconstruct the Hall signal required for motor rotation in the case of a single Hall-effect sensor failure, and ensured the stable operation for the BLDC motor on the exoskeleton.








Similar content being viewed by others

References
Wolff J et al (2014) A survey of stakeholder perspectives on exoskeleton technology. J Neuroeng Rehabil 11(1):169
Gorgey AS (2018) Robotic exoskeletons: The current pros and cons. World J Orthopedics 9(9):112
Nabeshima C et al (2014) Risk management for wearable walking assistant robot. J Robot Soc Japan 32:380–385
Sankai Y (2011) HAL: hybrid assistive limb based on cybernics. Berlin, Heidelberg: Springer Berlin Heidelberg
Wesslén J (2018) Exoskeleton exploration : research, development, and applicability of industrial exoskeletons in the automotive industry. p 46
Nabeshima C et al (2018) Standard performance test of wearable robots for lumbar support. IEEE Robot Automation Lett 3(3):2182–2189
Salah WA et al (2019) Electric vehicle technology impacts on energy. Int J Power Electron Drive Syst 10(1):1
Sharma PK, Sindekar A (2016) Performance analysis and comparison of BLDC motor drive using PI and FOC. In: 2016 International conference on global trends in signal processing, information computing and communication (ICGTSPICC). IEEE.
Waikar S et al. (1999) Evaluation of multiphase brushless permanent magnet (BPM) motors using finite element method (FEM) and experiments. In: APEC'99. fourteenth annual applied power electronics conference and exposition. 1999 Conference Proceedings (Cat. No. 99CH36285). IEEE
Fox JC, ER Collins (2008) Commutation failure of DC motor drives from voltage sags during regeneration. In: 2008 13th international conference on harmonics and quality of power
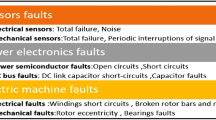
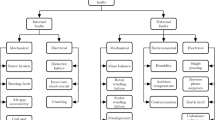
Karmakar S et al (2016) Induction motor and faults. Induction motor fault diagnosis: approach through current signature analysis. Springer Singapore, Singapore, pp 7–28
ISO 10218–1:2011 Robots and robotic devices — Safety requirements for industrial robots — Part 1: Robots. 2011, International Organization for Standardization
ISO 10218–2:2011 Robots and robotic devices — Safety requirements for industrial robots — Part 2: Robot systems and integration. 2011, International Organization for Standardization
ISO 13482:2014 Robots and robotic devices — Safety requirements for personal care robots. 2014, International Organization for Standardization
Jack AG, Mecrow BC, Haylock JA (1996) A comparative study of permanent magnet and switched reluctance motors for high-performance fault-tolerant applications. IEEE Trans Ind Appl 32(4):889–895
Kim H, Asbeck AT (2020) An elbow exoskeleton for haptic feedback made with a direct drive hobby motor. HardwareX 8:e00153
Pei P et al (2018) Sensorless control for joint drive unit of lower extremity exoskeleton with cascade feedback observer. Math Probl Eng 2018:3029514
Gamazo-Real JC, Vázquez-Sánchez E, Gómez-Gil J (2010) Position and speed control of brushless DC motors using sensorless techniques and application trends. Sensors (Basel) 10(7):6901–6947
Hubik VM, Sveda, Singule V (2008) On the development of BLDC motor control run-up algorithms for aerospace application. pp1620–1624.
Fathima A, Vijayasree G (2021) Design of BLDC motor with torque ripple reduction using spider-based controller for both sensored and sensorless approach. Arabian J Sci Eng 47:2965
Viramontes E (2019) BLDC motor control with hall effect sensors using the 9S08MP
Matlab. Mathworks
Lee T-Y et al (2014) Phase advance control to reduce torque ripple of brush-less DC motor according to winding connection, wye and delta. J Electrical Eng Technol 9:2201–2208
Sdudhe S, Thosar AG (2014) Mathematical modelling and simulation of three phase bldc motor using matlab/Simulink. Int J Adv Eng Technol 7(5):1426
Jimenez-Gonzalez J et al (2021) Parameter identification of bldc motor using electromechanical tests and recursive least-squares algorithm: experimental validation. Actuators 10(7):143
Li C, Li C, Wang Z (2014) Finite element method simulation and comparison of a segmented-PM motor and a whole-PM motor. J. Comput. 9(9):2058–65
Ma M (2015) Analytical methods for minimizing detent force in long-stator PM linear motor including longitudinal end effects. In: 2015 IEEE International Magnetics Conference (INTERMAG)
Bolton W (2004) 2 - Instrumentation system elements. In: Bolton W (ed) Instrumentation and control systems. Newnes, Oxford, pp 17–67
Wach P (2011) Brushless DC motor drives (BLDC), in dynamics and control of electrical drives, P. Wach, Editor. Springer Berlin Heidelberg: Berlin, Heidelberg. p 281–380
Yen-Shin L, Fu-San S, Yung-Hsin C (2004) Novel loss reduction pulsewidth modulation technique for brushless dc motor drives fed by MOSFET inverter. IEEE Trans Power Electron 19(6):1646–1652
Mahmoud MS (2018), Chapter 3 - control design of continuous-time systems, in advanced control design with application to electromechanical systems, M.S. Mahmoud, Editor. Butterworth-Heinemann. p 73–149.
Sriratana W, Murayama R (2013) Measurement of the lubricant properties using hall effect sensor: a study on contamination and viscosity. Engineering 05:386–393
Dong L et al (2016) Fault diagnosis and signal reconstruction of hall sensors in brushless permanent magnet motor drives. IEEE Trans Energy Convers 31(1):118–131
Yoon Y-H et al (2006) Implementation of low cost and advanced slotless brushless dc motor drive using PLL algorithm. Electr Power Compon Syst 34:967–984
Gu J et al (2013) Driving and braking control of PM synchronous motor based on low-resolution hall sensor for battery electric vehicle. Chinese J Mech Eng 26(1):1–10
Gohiya CS et al. (2013) Design and development of digital PID controller for DC motor drive system using embedded platform for mobile robot. In: 2013 3rd IEEE International Advance Computing Conference (IACC). IEEE
Villani M et al. (2010) Multi-phase fault tolerant drives for aircraft applications. In: Electrical systems for aircraft, railway and ship propulsion. IEEE
Joy J, Ushakumari S (2016) Performance comparison of a sensorless PMBLDC motor drive system with conventional and fuzzy logic controllers. Procedia Technol 25:643–651
Verma V, Pal NS, Kumar B (2019) Speed control of the sensorless BLDC motor drive through different controllers. Harmony search and nature inspired optimization algorithms: theory and applications, ICHSA 2018. Springer Singapore, Singapore
Osipov A (2019) Fire exoskeleton to facilitate the work of the fireman. E3S Web Conf., 126: 00015
Acknowledgements
This work was supported by the Guangdong Province Collaborative Innovation and Platform Environment Construction Special Fund Projects
Funding
Science and Technology Service Network Plan (201802010067).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yang, L., Qu, C., Jia, B. et al. The design of an affordable fault-tolerant control system of the brushless DC motor for an active waist exoskeleton. Neural Comput & Applic 35, 2027–2037 (2023). https://doi.org/10.1007/s00521-022-07362-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-022-07362-7