
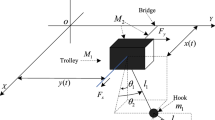
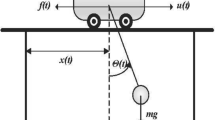
A non-linear model for an overhead crane system is derived which takes into account a combination of a trolley and a pendulum. The overall mathematical model obtained is simulated using MATLAB-SIMULINK. Open-loop simulations run on cases depending on whether the air resistance is taken into account or not, and whether the angle of oscillation is small or large, indicate the validity of such model, hence reflecting similar trends in industries which are concerned with material handling equipment. A hand-crafted fuzzy controller, which includes two rule bases, one for position control, the other for sway-angle control, was designed and successfully implemented on the above simulated model. Preliminary results are very encouraging, and indicate the feasibility of such a two rule base control strategy. The results obtained are presented, analysed and discussed.
Similar content being viewed by others
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Mahfouf, M., Kee, C., Abbod, M. et al. Fuzzy Logic-Based Anti-Sway Control Design for Overhead Cranes. NCA 9, 38–43 (2000). https://doi.org/10.1007/s005210070033
Issue Date:
DOI: https://doi.org/10.1007/s005210070033