
Abstract
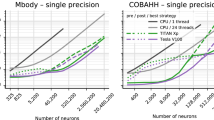
To understand the mechanism of information processing by a biological neural network, computer simulation of a large-scale spiking neural network is an important method. However, because of a high computation cost of the simulation of a large-scale spiking neural network, the simulation requires high performance computing implemented by a supercomputer or a computer cluster. Recently, hardware for parallel computing such as a multi-core CPU and a graphics card with a graphics processing unit (GPU) is built in a gaming computer and a workstation. Thus, parallel computing using this hardware is becoming widespread, allowing us to obtain powerful computing power for simulation of a large-scale spiking neural network. However, it is not clear how much increased performance the parallel computing method using a new GPU yields in the simulation of a large-scale spiking neural network. In this study, we compared computation time between the computing methods with CPUs and GPUs in a simulation of neuronal models. We developed computer programs of neuronal simulations for the computing systems that consist of a gaming graphics card with new architecture (the NVIDIA GTX 1080) and an accelerator board using a GPU (the NVIDIA Tesla K20C). Our results show that the computing systems can perform a simulation of a large number of neurons faster than CPU-based systems. Furthermore, we investigated the accuracy of a simulation using single precision floating point. We show that the simulation results of single precision were accurate enough compared with those of double precision, but chaotic neuronal response calculated by a GPU using single precision is prominently different from that calculated by a CPU using double precision. Furthermore, the difference in chaotic dynamics appeared even if we used double precision of a GPU. In conclusion, the GPU-based computing system exhibits a higher computing performance than the CPU-based system, even if the GPU system includes data transfer from a graphics card to host memory.





Similar content being viewed by others

References
Aihara K, Matsumoto G, Ikegaya Y (1984) Periodic and non-periodic responses of a periodically forced Hodgkin–Huxley oscillator. J Theor Biol 109(2):249–269
Ananthanarayanan R, Esser SK, Simon HD, Modha DS (2009) The cat is out of the bag: cortical simulations with \(10^9\) neurons, \(10^{13}\) synapses. In: IEEE computer society, pp. 1–12
Baladron J, Fasoli D, Faugeras O (2012) Three applications of GPU computing in neuroscience. Comput Sci Eng 14(3):40–47
Bernhard F, Keriven R (2006) Spiking neurons on GPUs. In computational science ICCS 2006. Springer, Berlin, pp 236–243
Beyeler M, Dutt ND, Krichmar JL (2013) Categorization and decision-making in a neurobiologically plausible spiking network using a STDP-like learning rule. Neural Netw 48:109–124
Beyeler M, Oros N, Dutt N, Krichmar JL (2015) A GPU-accelerated cortical neural network model for visually guided robot navigation. Neural Netw 72:75–87
Beyeler M, Richert M, Dutt ND, Krichmar JL (2014) Efficient spiking neural network model of pattern motion selectivity in visual cortex. Neuroinform 12(3):435–454
Bray LCJ, Anumandla SR, Thibeault CM, Hoang RV, Goodman PH, Dascalu SM, Bryant BD, Harris FC (2012) Real-time human–robot interaction underlying neurorobotic trust and intent recognition. Neural Netw 32:130–137
Brette R (2015) Philosophy of the spike: rate-based vs. spike-based theories of the brain. Front Syst Neurosci 9:151
Carlson KD, Nageswaran JM, Dutt N, Krichmar JL (2014) An efficient automated parameter tuning framework for spiking neural networks. Front Neurosci 8:10
Cheng J, Grossman M, McKercher T (2014) Professional CUDA C programming. Wrox, Birmingham
de Camargo RY, Rozante L, Song SW (2011) A multi-GPU algorithm for large-scale neuronal networks. Concurr Comput Pract Exp 23(6):556–572
Dinkelbach HU, Vitay J, Beuth F, Hamker FH (2012) Comparison of GPU- and CPU-implementations of mean-firing rate neural networks on parallel hardware. Network 23(4):212–236
Fidjeland AK, Shanahan MP (2010) Accelerated simulation of spiking neural networks using GPUs. In 2010 International joint conference on Neural networks (IJCNN), pp 1–8
Gangal H, Dar G (2014) Mode locking, chaos and bifurcations in Hodgkin–Huxley neuron forced by sinusoidal current. Chaot Simul Model 3:287–294
Gerstner W, Kistler WM (2002) Spiking neuron model, chapter noise in spiking neuron models. Cambridge University Press, New York, pp 157–209
Goodman DFM (2010) Code generation: a strategy for neural network simulators. Neuroinformatics 8(3):183–196
Hoang RV, Tanna D, Bray JCL, Dascalu SM, Harris FCJ (2013) A novel CPU/GPU simulation environment for large-scale biologically realistic neural modeling. Front Neuroinform 7:19
Hodgkin AL, Huxley AF (1952) A quantitative description of membrane current and its application to conduction and excitation in nerve. J Physiol 117(4):500–544
Igarashi J, Shouno O, Fukai T, Tsujino H (2011) Real-time simulation of a spiking neural network model of the basal ganglia circuitry using general purpose computing on graphics processing units. Neural Netw 24(9):950–960
Izhikevich EM (2003) Simple model of spiking neurons. IEEE Trans Neural Netw 14(6):1569–1572
Izhikevich EM (2004) Which model to use for cortical spiking neurons? IEEE Trans Neural Netw 15(5):1063–1070
Izhikevich EM, Edelman GM (2008) Large-scale model of mammalian thalamocortical systems. Proc Nat Acad Sci USA 105(9):3593–3598
Liao S, Wang P (2014) On the mathematically reliable long-term simulation of chaotic solutions of Lorenz equation in the interval [0 10000]. Sci China Phys Mech Astron 57:330–335
Morris C, Lecar H (1981) Voltage oscillations in the barnacle giant muscle fiber. Biophys J 35:193–213
Nageswaran JM, Dutt N, Krichmar JL, Nicolau A, Veidenbaum A (2009) Efficient simulation of large-scale spiking neural networks using CUDA graphics processors. In: 2009 Proceedings of international joint conference on neural networks, pp 2145–2152
Nageswaran JM, Dutt N, Krichmar JL, Nicolau A, Veidenbaum AV (2009) A configurable simulation environment for the efficient simulation of large-scale spiking neural networks on graphics processors. Neural Netw 22(5–6):791–800
Pallipuram VK, Bhuiyan MA, Smith MC (2011) Evaluation of GPU architectures using spiking neural networks. In: 2011 Symposium application accelerators in high-performance computing, pp. 93–102
Pallipuram VK, Bhuiyan M, Smith MC (2012) A comparative study of GPU programming models and architectures using neural networks. J Supercomput 61(3):673–718
Pallipuram VK, Smith MC, Sarma N, Anand R, Weill E, Sapra K (2015) Subjective versus objective: classifying analytical models for productive heterogeneous performance prediction. J Supercomput 71:162–201
Richert M, Nageswaran JM, Dutt N, Krichmar JL (2011) An efficient simulation environment for modeling large-scale cortical processing. Front Neuroinform 5:19
Trappenberg T (2010) Fundamentals of computational neuroscience. OUP, Oxford
Wang F (2015) Simulation tool for asynchronous cortical streams (STACS): interfacing with spiking neural networks. Proc Comput Sci 61:322–327
Yamazaki T, Igarashi J (2013) Realtime cerebellum: a large-scale spiking network model of the cerebellum that runs in realtime using a graphics processing unit. Neural Netw 47:103–111
Yavuz E, Turner J, Nowotny T (2016) GeNN: a code generation framework for accelerated brain simulations. Sci Rep 6:18854
Acknowledgements
This work was supported by JSPS KAKENHI Grant No. 15K07146.
Author information
Authors and Affiliations
Corresponding author
Appendix Hodgkin–Huxley model
Appendix Hodgkin–Huxley model
The Hodgkin–Huxley model consists of four differential equations. One equation denotes the dynamics of the membrane potential:
where C is the membrane capacitance, I is an applied current, \(g_{\mathrm {Na}}, g_{\mathrm {K}}\), and \(g_L\) are respectively the conductances of \(\hbox {Na}^+, \hbox {K}^+\), and leak channels, and \(E_{\mathrm {Na}}, E_{\mathrm {Na}}\), and \(E_L\) are respectively the reversal potentials of \(\hbox {Na}^+, \hbox {K}^+\), and leak channels. The model has terms derived from a sodium current, a potassium current, and a leak current. m, n, and h are gating variables denoted by
\(\alpha (V)\) and \(\beta (V)\) are voltage-dependent rates:
We set the parameters: \(I(t) \,{=}\, 20 \, \hbox {mA}, V_{\mathrm {K}} \,{=}\, -\,95 \,\hbox {mV}, V_{\mathrm {Na}} \,{=}\, 57 \,\hbox {mV}, V_L = -\, 50 \,\hbox {mV}, g_{\mathrm {K}} = 36 \,\hbox {mS}/\hbox {cm}^2, g_{\mathrm {Na}} = 120 \,\hbox {mS}/\hbox {cm}^2, g_L \,{=}\, 0.3 \,\hbox {mS}/\hbox {cm}^2, V_{\mathrm {K}} = -\,95 \,\hbox {mV}, V_\mathrm = 57 \,\hbox {mV}, V_L = -\, 50\, \hbox {mV},\, \hbox {and}\, C = 1 \,\upmu \hbox {F}/\hbox {cm}^2\).
Rights and permissions
About this article

Cite this article
Fujita, K., Okuno, S. & Kashimori, Y. Evaluation of the computational efficacy in GPU-accelerated simulations of spiking neurons. Computing 100, 907–926 (2018). https://doi.org/10.1007/s00607-018-0590-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00607-018-0590-0