
Abstract
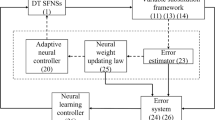
A cost function is useful for a confirmation of neural network controller learning performance, but, this confirmation may not be correct for neural networks. Previous papers proposed a tracking method of neural network weight change and simulated it on the application of both learning and adaptive type neural network direct controllers. This paper applies the tracking method to an adaptive type neural network feedforward feedback controller and simulates it. The simulation results confirm that a track of the neural network weight change is separated into two trajectories. They also discuss the relationship between the feedback gain of the feedback controller and the parameter determining the neural network learning speed.
Similar content being viewed by others


References
Yamada T (2005) Remarks on tracking method of neural network weight change for learning type neural network direct controller. In: Proceedings of AROB 10th’ 05 (The Tenth International Symposium on Artificial Life and Robotics 2005), pp 624–627
Yamada T (2006) Remarks on tracking method of neural network weight change for adaptive type neural network direct controller. In: Proceedings of AROB 11th’ 06 (The Eleventh International Symposium on Artificial Life and Robotics 2006), GS19-3
Narendra KS, Parthictsarathy K (1990) Identification and control of dynamics system using neural networks. In: IEEE Trans Neural Networks 1(1):4–27
Yamada T, Yabuta T (1994) Adaptive type feedforward feedback controller using neural networks (in Japanese). Trans Soc Instrument Control Eng 30(10):1234–1241
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 13th International Symposium on Artificial Life and Robotics, Oita, Japan, January 31–February 2, 2008
About this article
Cite this article
Yamada, T. Remarks on tracking method of neural network weight change for adaptive type neural network feedforward feedback controller. Artif Life Robotics 13, 286–289 (2008). https://doi.org/10.1007/s10015-008-0554-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-008-0554-0