
Abstract
We propose a technique for detecting pedestrians by employing stereo camera images and based on probabilistic voting. From a disparity map, each pixel on the image is voted on a depth map employing a 2-D Gaussian distribution. The region having the peak value in the vote is chosen as the foot of an object. The object is specified by a rectangle on the right image, which is referred to as the region of interest (ROI). This ROI is described by HOG features, and is judged by SVM if it contains a person. With an ROI containing a person, a Kalman filter is applied to track the person through successive image frames. The performance of the detection of people was evaluated by employing ground truth data. The ratio of people detected to the ground truth data, called the recall rate, was 80%. This is a satisfactory result.
Similar content being viewed by others


References
Gavrila DM (2000) Pedestrian detection from a moving vehicle. Proceedings of the European Conference on Computer Vision, vol 2, pp 37–49
Matsushima K, Zhencheng H, Uchimura K (2006) Pedestrian recognition using stereo sensor. Information Processing Society, Research Report, pp 49–54
Zhao L, Thorpe CE (2000) Stereo and neural network based pedestrian detection. IEEE Trans Intel Transport Syst 1(3):148–154
Franke U, Joos (2000) Real time stereo vision for urban traffic scene understanding. Proceedings of the IEEE Intelligent Vehicles Symposium
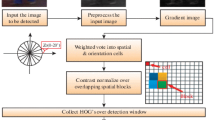
Dalal N, Triggs B (2005) Histograms of oriented gradients for human detection. Proceedings of IEEE Computer Vision and Pattern Recognition, pp 886–893
Welch G, Bishop G (1995) An introduction to the Kalman filter. Technical Report TR95-041, University of North Carolina at Chapel Hill
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 15th International Symposium on Artificial Life and Robotics, Oita, Japan, February 4–6, 2010
About this article
Cite this article
Tan, J.K., Inumaru, K., Ishikawa, S. et al. Automatic detection of pedestrians from stereo camera images. Artif Life Robotics 15, 459–463 (2010). https://doi.org/10.1007/s10015-010-0843-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-010-0843-2