
Abstract
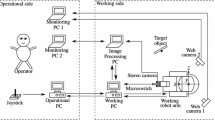
In this paper, a teleoperation system for a mobile robot with visual servo mechanism is developed. The teleoperation system has two kinds of motions: rough motion and accurate motion. In the rough motion, the mobile robot is controlled manually. In the accurate motion, it is done autonomously by visual servoing, where the template matching technique is used to realize the visual servoing. The template image is automatically generated by only assigning one pixel of the target object. The usefulness of the developed teleoperation system is evaluated by experimental result for the automatic template generation and the teleoperation.







Similar content being viewed by others


References
Sheridan T (1995) Teleoperation, telerobotics and telepresence: a progress report. Control Eng Pract 3(2):204–214
Bradski G, Kaehler A (2008) Learning OpenCV: computer vision with the OpenCV library. O’Reilly Media, Sebastopol
Hutchinson S, Hager GD, Corke PI (1996) A tutorial on visual servo control. IEEE Trans Robot Autom 12(5):651–670
Pallegedara A, Matsuda Y, Matsumoto T, Tsukamoto K, Egashira N, Goto S (2012) Teleoperation of robot arms using force-free control and template matching. Int J Innov Comput Inf Control 8(10A):6869–6884
Pallegedara A, Matsuda Y, Egashira N, Sugi T, Goto S (2013) Experimental evaluation of teleoperation system with force-free control and visual servo control by human operator perception. Artif Life Robot 17(3–4):388–394
Matsuda Y, Tsukamoto K, Matsumoto T, Goto S, Sugi T, Egashira N (2014) Remote operation system of robot arm with visual servo mechanism by target selection. Int J Innov Comput Inf Control 10(4):1381–1390
Matsuda Y, Sugi T, Goto S, Egashira N (2016) Teleoperation of robot arm with position measurement via angle-pixel characteristic and visual supporting function. Artif Life Robot 21(4):478–485
Goto S (2006) Forcefree control for flexible motion of industrial articulated robot arm. Industrial robotics: theory, modelling and control, Chapter 30. Pro Literatur Verlag, Mammendorf, pp 813–840
Salgado I, Cruz-Ortiz D, Camacho O, Chairez I (2017) Output feedback control of a skid-steered mobile robot based on the super-twisting algorithm. Control Eng Pract 58:193–203
Li W, Liu Z, Gao H, Zhang X, Tavakoli M (2016) Stable kinematic teleoperation of wheeled mobile robots with slippage using time-domain passivity control. Mechatronics 39:196–203
Simba KR, Uchiyama N, Sano S (2016) Real-time smooth trajectory generation for nonholonomic mobile robots using Bézier curves. Robot Comput Integr Manuf 41:31–42
Tatsumoto K, Iwaki S, Ikeda T (2017) Tracking projection method for 3D space by a mobile robot with camera and projector based on a structured-environment approach. Artif Life Robot 22(1):90–101
Morales B, Roberti F, Toibero JM, Carelli R (2012) Passivity based visual servoing of mobile robots with dynamic compensation. Mechatronics 22(4):481–490
Aliakbarpour H, Tahri O, Araujo H (2014) Visual servoing of mobile robots using non-central catadioptric cameras. Robot Auton Syst 62(11):1613–1622
Mekonnen G, Kumar S, Pathak PM (2016) Wireless hybrid visual servoing of omnidirectional wheeled mobile robots. Robot Auton Syst 75:450–462
Choi S, Kim E, Lee K, Oh S (2017) Real-time nonparametric reactive navigation of mobile robots in dynamic environments. Robot Auton Syst 91:11–24
Acknowledgements
The authors would like to thank Mr. Hironobu Yanai, Department of Advanced Technology Fusion, Saga University for his experimental studies.
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Matsuda, Y., Sugi, T., Goto, S. et al. Teleoperation system for a mobile robot with visual servo mechanism based on automatic template generation. Artif Life Robotics 22, 490–496 (2017). https://doi.org/10.1007/s10015-017-0374-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-017-0374-1