
Abstract
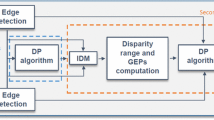
This paper presents a fast approach for matching stereoscopic images acquired by stereo cameras mounted aboard a moving car. The proposed approach exploits the spatio-temporal consistency between consecutive frames in stereo sequences to improve matching results. This means that the matching process at current frame uses the matching results obtained at its preceding one. The preceding frame allows to compute an Initial Disparity Map for the current frame. The initial disparity map is used to derive disparity ranges for each scanline as well as what we call Matching Control Edge Points. Dynamic programming is performed for matching edge points in stereo pairs. The matching control edge points are used to drive the search for an optimal solution in the search plane. This is accomplished by dividing the dynamic programming search space into a number of subspaces depending on the number of the matching control edge points. The proposed approach has been tested both on virtual and real stereo images sequences demonstrating satisfactory performance.
















Similar content being viewed by others

References
Barnard S, Fisher M (1982) Computational stereo. ACM Comput Surv 14:553–572
Bertozzi M, Broggi A, Fascioli A (2000) Vision-based intelligent vehicles: state of the art and perspectives. Rob Auton Syst 32:1–16
Boykov Y, Veksler O, Zabih R (2001) Fast approximate energy minimization via graph cuts. IEEE Trans Pattern Anal Mach Intell 23(11):1222–1239
Brown MZ, Burschka D, Hager GD (2003) Advances in computational stereo. IEEE Trans Pattern Anal Mach Intell 25(8):993–1008
Canny J (1986) A computational approach to edge detection. IEEE Trans Pattern Anal Mach Intell 8(6):679698
Cyganek B, Borgosz J (2003) An improved variogram analysis of the maximum expected disparity in stereo images. In: Bigun J, Gustavsson T (eds), SCIA 2003, LNCS 2749, pp 640–645
Davis J, Nehab D, Ramamoorthi R, Rusinkiewicz S (2005) Spacetime stereo: a unifying framework for depth from triangulation. IEEE Trans Pattern Anal Mach Intell 27(2):1–7
Dhond UR, Aggarwal JK (1989) Sructure from stereo—a review. IEEE Trans Syst Man Cybern 19:1489–1510
El-Ansari M, Mousset S, Bensrhair A (2008) A new stereo matching approach for real-time road obstacle detection for situations with deteriorated visibility. In: Proceedings of the IEEE intelligent vehicle symposium. Eindhoven University of Technology, Eindhoven
El-Ansari M, Mousset S, Bensrhair A (2010) Temporal consistent real-time stereo for intelligent vehicles. Pattern Recogn Lett 31(11):1226–1238
El-Ansari M, Mousset S, Bensrhair A, Bebis G (2010) Temporal consistent fast stereo matching for advanced driver assistance systems (ADAS). In: Proceedings of the IEEE intelligent vehicles symposium. San Diego, pp 825–831
Gong M (2006) Enforcing temporal consistency in real-time stereo estimation. In: Proceedings of the European conference on computer vision, Graz, pp III–564–577
Labayrade R, Aubert D, Tarel JP (2002) Real time obstacle detection in stereo vision on non flat road geometry through v-disparity representation. In: Proceedings IEEE intelligent vehicle symposium, Versailles
Leung C, Appleton B, Lovell BC, Sun C (2004) An energy minimisation approach to stereo-temporal dense reconstruction. In: Proceedings of the IEEE international conference on pattern recognition, Cambridge, pp 72–75
Lowe DG (2004) Distinctive image features from scale-invariant keypoints. Int J Comput Vision 60(2):91–110
Miché P, Debrie R (1995) Fast and self-adaptive image segmentation using extended declivity. Ann Telecommun 50(3–4):401–410
Otha Y, Kanade T (1989) Stereo by intra- and inter-scanline search using dynamic programming. IEEE Trans Pattern Anal Mach Intell 7(2):139–154
Scharstein D, Szeliski R (2002) A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. Int J Comput Vision 47(1–3):7–42
Stereo data for algorithms evaluation (2008) http://stereodatasets.wvandermak.com/
Tao H, Sawhney HS, Kumar R (2001) Dynamic depth recovery from multiple synchronized video streams. In: Proceedings of IEEE international conference on computer vision and pattern recognition. Kauai
Vedula S, Baker S, Rander P, Collins R, Kanade T (1991) Three-dimensioal scene flow. In: Proceedings of IEEE international conference on computer vision and pattern recognition, pp II–722–729
Zhang L, Curless B, Seitz SM (2003) Spacetime stereo: shape recovery for dynamic scenes. In: Proceedings of IEEE international conference on computer vision and pattern recognition, Madison, pp 367–374
Zhang G, Jia J, Wong T, Bao H (2009) Consistent depth maps recovery from a video sequence. IEEE Trans Pattern Anal Mach Intell 31(6):974–988
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Mazoul, A., El Ansari, M., Zebbara, K. et al. Fast spatio-temporal stereo for intelligent transportation systems. Pattern Anal Applic 17, 211–221 (2014). https://doi.org/10.1007/s10044-012-0310-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10044-012-0310-x