
Abstract
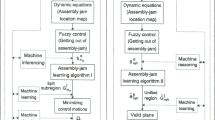
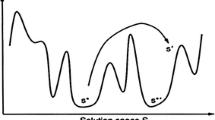
Correlations among three performance indices, including the probability of success, fuzzy entropy, and system energy, with a decision about training parameters based on the energy variation of a neural network system are newly introduced. Methodologies are used based on the robot’s part micro-assembly. The enhancement of efficiency in the performance of the robot’s part-in-assembly hole (target) task implies the maximization of the probability of success as well as the minimization of fuzzy entropy and system energy in the execution of the associated task. Two part micro-assembly algorithms are introduced that bring a part from an initial position to a target for the purposes of part-mating and storage. The two part micro-assembly algorithms are then compared through simulations and chosen specific criteria. Also, the novelty of the methodologies used in this paper is described. In the 1st algorithm, a grid based on a neural network categorizes an assembly type which is fed to a fuzzy coordinator that places the part at the selected position, where it is ready to mate successfully with a target. The energy variation of the neural network system is used as a new tool to find better values of training parameters, such as the learning rate, the number of nodes in a hidden layer, and the momentum. The 2nd algorithm is a fuzziness-minimizing learning algorithm that assists the robot to adapt to its unfamiliar workspace. The 2nd algorithm then finds a plan with the lowest degree of uncertainty among the generated feasible plans composed of a sequence of coordinates from the part’s arbitrary starting to the target positions. The results obtained by the two algorithms show that the three performance indices reach the desirable states such that the fuzzy entropy and the system energy are minimized and the probability of success is simultaneously maximized as trainings are successively reiterated. The results also show that the three performance indices can be a useful tool to estimate the performance results of a robot’s various types of part assemblies.














Similar content being viewed by others
References
Burbidge R, Wilson M (2014) Vector-valued function estimation by grammatical evolution for autonomous robot control. Inf Sci 258:182–199
Fabrizi E, Saffiotti A (2002) Augmenting topology-based maps with geometric information. Robot Auton Syst 40:91–97
Gasparetto A, Zanotto V (2008) Technique for time-jerk optimal planning for robot trajectories. Robot Comput Integr Manuf 24:415–426
Hakvoort W, Aarts R, Jonker D (2008) Lifted system iterative learning control applied to an industrial robot. Control Eng Pract 16:377–391
Xiao D, Ghosh B (2004) Real-time integration of sensing,planning and control in robotic work-cells. Control Eng Pract 12: 653–663
Liao X, Wang G (2005) Employing fractals and FEM for detailed variation analysis of non-rigid assemblies. Int J Mach Tools Manuf 45:445–454
Son C (2004) Intelligent control planning strategies with neural network/fuzzy coordinator and sensor fusion for robotic part macro/micro-assembly tasks in a partially unknown environment. Int J Mach Tools Manuf 44:1667–1681
Son C (2006) Systematic strategy for choosing optimal membership function and fuzzy rulebase based on fuzzy entropy for intelligent control of robotic part assembly tasks. J Intell Fuzzy Syst 17(5):443–456
Son C (2007) Correlation between learning (probability of success) and fuzzy entropy in control of intelligent robot’s part macro-assembly tasks with sensor fusion techniques. Robot Comput Integr Manuf 23:47–62
Son C (2011) Intelligent robotic path finding methodologies with fuzzy/crisp entropies and learning. Int J Robot Autom 26(3): 323–336
Son C (2013) Similarity measuring strategy of image patterns based on fuzzy entropy and energy variations in intelligent robot’s manipulative task. Appl Intell 38:131–145
Sun S. (2005) Designing approach on trajectory-tracking control of mobile robot. Robot Comput Integr Manuf 21:81–85
Surdhar J, White A (2003) A parallel fuzzy-controlled flexible manipulator using optical tip feedback. Robot Comput Integr Manuf 19:273–282
Webers C, Zimmer U (2002) Motion control of mobile robots-from static targets to fast drives in moving crowds. Auton Robot 12:173–185
Worcester J, Hsieh M, Lakaemper R (2014) Distributed assembly with online workload balancing and visual error detection and correction. Int J Robot Res 33:534–546
Madhiarasan M, Deepa S (2016) A novel criterion to select hidden neuron numbers in improved back propagation networks for wind speed forecasting. Appl Intell 44(4):878–893
Ayvaz D, Topcuoglu H, Gurgen F (2012) Performance evaluation of evolutionary heuristics in dynamic environments. Appl Intell 37(1):130–144
Ma Y, Zheng G, Perruquetti W, Qiu Z (2015) Local path planning for mobile robots based on intermediate objectives. Robotica 33(4):1017–1031
Chen S, Chen Z (2016) Weighted fuzzy interpolative reasoning for sparse fuzzy rule-based systems based on piecewise fuzzy entropies of fuzzy sets. Inform Sci 329:503–523
Zimmermann H (1991) Fuzzy Set Theory and its Application. Kluwer Academic Publishers
Kosko B. (1992) Neural Networks and Fuzzy Systems. Prentice-Hall
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Son, C. Correlations among three performance indices with decision about training parameters based on energy variation in a robot’s part micro-assembly methodologies. Appl Intell 46, 551–568 (2017). https://doi.org/10.1007/s10489-016-0847-2
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10489-016-0847-2