
Abstract
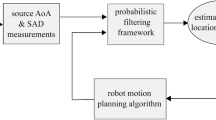
In this work, we describe an autonomous mobile robotic system for finding, investigating, and modeling ambient noise sources in the environment. The system has been fully implemented in two different environments, using two different robotic platforms and a variety of sound source types. Making use of a two-step approach to autonomous exploration of the auditory scene, the robot first quickly moves through the environment to find and roughly localize unknown sound sources using the auditory evidence grid algorithm. Then, using the knowledge gained from the initial exploration, the robot investigates each source in more depth, improving upon the initial localization accuracy, identifying volume and directivity, and, finally, building a classification vector useful for detecting the sound source in the future.
Similar content being viewed by others

References
Ali, A., Collier, T., Girod, L., Yao, K., Taylor, C. E., & Blumstein, D. T. (2007). An empirical study of collaborative acoustic source localization. In Proceedings of international conference on information processing in sensor networks (pp. 41–50). Cambridge, MA, USA. New York: ACM.
Bian, X., & Abowd, G. (2005). Using sound source localization in a home environment. In Proceedings of third international conference on pervasive computing (pp. 19–36). Munich, Germany.
Dellaert, F., Alegre, F., & Martinson, E. (2003). Intrinsic localization and mapping with 2 applications: Diffusion mapping and Marco Polo localization. In Proceedings of IEEE international conference on robotics and automation (pp. 2344–2349). Taipei, TW. New York: IEEE Press.
Duda, R., Hart, P., & Stork, D. (2001). Pattern classification. New York: Wiley.
Elfes, A. (1992). Multi-source spatial data fusion using Bayesian reasoning. In M. A. Abidi & R. C. Gonzales (Eds.), Data fusion in robotics and machine intelligence. New York: Academic Press.
Gerkey, B., Vaughan, R., & Howard, A. (2006). Player user manual v2.1. Player/Stage Project, http://playerstage.sourceforge.net, Retrieved September, 2005, from http://playerstage.sourceforge.net.
Girod, L., Lukac, M., Trifa, V., & Estrin, D. (2006). The design and implementation of a self-calibrating distributed acoustic sensing platform. In Proceedings of international conference on embedded networked sensor systems (pp. 71–84). Boulder, CO, USA. New York: ACM.
Hu, J., Liu, W., Cheng, C., & Yang, C. (2006). Location and orientation detection of mobile robots using sound field features under complex environments. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems (pp. 1151–1156). Beijing, China. New York: IEEE Press.
Hughes, K., Tokuta, A., & Ranganathan, N. (1992). Trulla: An algorithm for path planning among weighted regions by localized propagations. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems (pp. 469–476). Raleigh, NC. New York: IEEE Press.
Luo, R., Lai, C., & Liao, C. (2006). Rapid environment identification for intelligent mobile robot. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems (pp. 1158–1163). Beijing, China. New York: IEEE Press.
Martinson, E. (2007a). Masking the acoustic signature of a mobile robot. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems (pp. 985–990). San Diego, CA. New York: IEEE Press.
Martinson, E. (2007b). Acoustical awareness for intelligent robotic action. Ph.D. Thesis, College of Computing, Georgia Institute of Technology, Atlanta, GA, USA.
Martinson, E., & Brock, D. (2007). Improving human-robot interaction through adaptation to the auditory scene. In Proceedings of ACM/IEEE international conference on human-robot interaction (pp. 113–120). Arlington, VA. New York: ACM.
Martinson, E., & Schultz, A. (2006). Auditory evidence grids. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems (IROS) (pp. 1139–1144). Beijing, China. New York: IEEE Press.
Martinson, E., & Schultz, A. (2007). Robotic discovery of the auditory scene. In Proceedings of IEEE international conference on robotics and automation (pp. 435–440). Rome, Italy. New York: IEEE Press.
Moravec, H. (1998). Sensor fusion in evidence grids for mobile robots. AI Magazine, 9(2), 61–74.
Mungamuru, B., & Aarabi, P. (2004). Enhanced sound localization. IEEE Transactions on Systems, Man, and Cybernetics, 34(3), 1526–1540.
Nakadai, K., Nakajima, H., Murase, M., Okuno, H., Hasegawa, Y., & Tsujino, H. (2006). Real-time tracking of multiple sound sources by integration of in-room and robot-embedded microphone arrays. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems (pp. 852–859). Beijing, China. New York: IEEE Press.
Quatiri, T. (2002). Discrete time speech signal processing, Delhi, India. Upper Saddle River: Pearson Education.
Raichel, D. R. (2000). The science and applications of acoustics. New York: Springer.
Ravindran, S. (2006). Physiologically motivated methods for audio pattern classification. Ph.D. Thesis, School of Electrical and Computer Engineering, Georgia Institute of Technology, Atlanta, GA, USA.
Sasaki, Y., Kagami, S., & Mizoguchi, H. (2006). Multiple sound source mapping for a mobile robot by self-motion triangulation. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems (pp. 380–385). Beijing, China. New York: IEEE Press.
Schultz, A., & Adams, W. (1998). Continuous localization using evidence grids. In Proceedings of IEEE international conference on robotics and automation (pp. 2833–2839). Leuven, Belgium. New York: IEEE Press.
Slaney, M. (1994). The auditory toolbox (Apple Technical Report #45). Apple Computer Company.
Thrun, S. (2005). Affine structure from sound. In Proceedings of conference on neural information processing systems. Whistler, Canada. Cambridge: MIT Press.
Thrun, S., Fox, D., Dellaert, F., & Burgard, W. (2001). Particle filters for mobile robot localization. In A. Doucet, N. de Freitas, & N. Gordon (Eds.), Sequential Monte Carlo methods in practice. New York: Springer.
Tremain, T. E. (1982). The government standard linear predictive coding algorithm: Lpc-10. Speech Technology Magazine, April 1982 (pp. 40–49).
Treptow, A., Cielniak, G., & Duckett, T. (2005). Active people recognition using thermal and grey images on a mobile security robot. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems (pp. 2103–2108). Alberta, Canada. New York: IEEE Press.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Martinson, E., Schultz, A. Discovery of sound sources by an autonomous mobile robot. Auton Robot 27, 221–237 (2009). https://doi.org/10.1007/s10514-009-9123-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10514-009-9123-1