
Abstract
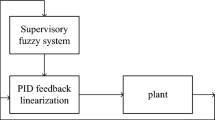
Based on the modeling of a micro autonomous underwater vehicle, an improved control structure and underlying control method are proposed for some parameters such as the automatic orientation, automatic depth, height, and speed of the micro autonomous underwater vehicle. A cascade double closed-loop control structure is proposed to control the horizontal plane by controlling properties such as the automatic depth, height, positioning, the response speed and adjustment precision of the control are improved. The parameters of the proportional-integral-derivative (PID) control method can be optimized by using particle swarm optimization (PSO), and the fuzzy controller is designed to compare with the PID control of the autonomous underwater vehicles. Compared with the traditional PID control, the control effect of PSO–PID controller is stronger than that of the tranditional PID controller. Due to the uncertainty of the micro autonomous underwater vehicle mathematical model, the position control of PID controller is weaker than the fuzzy controller. The simulation results show that the proposed method has fast dynamic response and acceptable robustness.














Similar content being viewed by others

References
Allotta, B., Costanzi, R., Fanelli, F., Monni, N., Ridolfi, A.: Single axis fog aided attitude estimation algorithm for mobile robots. Mechatronics 30, 158–173 (2015)
Cheng, R., Jin, Y.: A social learning particle swarm optimization algorithm for scalable optimization. Inf. Sci. 291(6), 43–60 (2015)
Esmin, A.A.A., Coelho, R.A., Matwin, S.: A review on particle swarm optimization algorithm and its variants to clustering high-dimensional data. Artif. Intell. Rev. 44(1), 23–45 (2015)
Elmokadem, T., Zribi, M., Youcef-Toumi, K.: Terminal sliding mode control for the trajectory tracking of underactuated autonomous underwater vehicles. Ocean Eng. 129, 613–625 (2016)
Kukulya, A., Plueddemann, A., Austin, T., Stokey, R., Purcell, M., Allen, B., et al.: Under-ice operations with a REMUS-100 AUV in the Arctic. Autonomous Underwater Vehicles 12, 1–8 (2010)
Khan, S.U., Yang, S., Wang, L., Liu, L.: A modified particle swarm optimization algorithm for global optimizations of inverse problems. IEEE Trans. Magn. 52(3), 1–4 (2016)
Liesk, T., Nahon, M., Boulet, B.: Design and experimental validation of a nonlinear low-level controller for an unmanned fin-less airship. IEEE Trans. Control Syst. Technol. 21(1), 149–161 (2013)
Liu, Y.J., Tong, S., Chen, C.L.P.: Adaptive fuzzy control via observer design for uncertain nonlinear systems with unmodeled dynamics. IEEE Trans. Fuzzy Syst. 21(2), 275–288 (2013)
Lu, Y., Yan, D., Levy, D.: Parameter estimation of vertical takeoff and landing aircrafts by using a PID controlling particle swarm optimization algorithm. Appl. Intell. 44(4), 793–815 (2016)
Marinaki, M., Marinakis, Y., Stavroulakis, G.E.: Fuzzy control optimized by a multi-objective differential evolution algorithm for vibration suppression of smart structures. Comput. Struct. 147, 126–137 (2015)
Rout, R., Subudhi, B.: Inverse optimal self-tuning pid control design for an autonomous underwater vehicle. Int. J. Syst. Sci. 48(2), 367–375 (2016)
Smith, S.M., Rae, G.J.S., Anderson, D.T.: Applications of fuzzy logic to the control of an autonomous underwater vehicle. In: IEEE International Conference on Fuzzy Systems, vol. 2, pp. 1099–1106 (1993)
Sun, J., Wu, X., Palade, V., Fang, W., Shi, Y.: Random drift particle swarm optimization algorithm: convergence analysis and parameter selection. Mach. Learn. 101(1), 345–376 (2015)
Tanakitkorn, K., Wilson, P.A., Turnock, S.R., Phillips, A.B.: Depth control for an over-actuated, hover-capable autonomous underwater vehicle with experimental verification. Mechatronics 41, 67–81 (2017)
Wang, H., Chen, B., Liu, X., Liu, K., Lin, C.: Robust adaptive fuzzy tracking control for pure-feedback stochastic nonlinear systems with input constraints. IEEE Trans. Cybern. 43(6), 2093–2104 (2013)
Liu, Y., Yang, Z., Ning, T., Wu, H.: Efficient quality-of-service (QoS) support in mobile opportunistic networks. IEEE Trans. Veh. Technol. 63(9), 4574–4584 (2014)
Yang, L.: Multi-copy data dissemination with probabilistic delay constraint in mobile opportunistic device-to-device networks. In: Proceedings of the IEEE 17th International Symposium on World of Wireless, Mobile and Multimedia networks (WoWMoM), pp. 1–9 (2016)
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China subsidization project (51579047), the Natural Science Foundation of Heilongjiang Province (QC2017048), the National Defense Technology Fundamental Research Funds (JSHS2015604C002), the Natural Science Foundation of Harbin (2016RAQXJ077), and the Open Project Program of State Key Laboratory of Millimeter Waves (K201707).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, L., Zhang, L., Liu, S. et al. Low-level control technology of micro autonomous underwater vehicle based on intelligent computing. Cluster Comput 22 (Suppl 4), 8569–8580 (2019). https://doi.org/10.1007/s10586-018-1909-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10586-018-1909-5