
Abstract
In this work we consider the network equilibrium problem formulated as convex minimization problem whose variables are the path flows. In order to take into account the difficulties related to the large dimension of real network problems we adopt a decomposition-based approach suitably combined with a column generation strategy. We present an inexact block-coordinate descent method and we prove the global convergence of the algorithm. The results of computational experiments performed on medium-large dimensional problems show that the proposed algorithm is at least competitive with state of the art algorithms.
Similar content being viewed by others


References
Bar-Gera, H.: Origin-based algorithm for the traffic assignment problem. Transp. Sci. 36, 398–417 (2002)
Bar-Gera, H.: Traffic assignment by paired alternative segments. Transp. Sci. B 44, 1022–1046 (2010)
Bar-Gera, H., Hellman, F., Patriksson, M.: Computational precision of traffic equilibria sensitivities in automatic network design and road pricing. Transp. Res. B 57, 485–500 (2013)
Bertsekas, D.P., Tsitsiklis, J.N.: Parallel and distributed computation: numerical methods. Prentice-Hall Inc, Upper Saddle River (1989)
Dafermos, S.C., Sparrow, F.T.: The traffic assignment problem for a general network. J. Res. Natl. Bur. Stand. 738, 91–118 (1969)
Dial, R.B.: A path-based user-equilibrium traffic assignment algorithm that obviates path storage and enumeration. Transp. Res. B 40(10), 917–936 (2006)
Florian, M., Constantin, I., Florian, D.: A new look at projected gradient method for equilibrium assignment. J. Transp. Res. Rec. Board 2090(0361–1981), 10–16 (2009)
Florian, M., Hearn, D.W.: Chapter Network Equilibrium Models. Hanbooks in OR & MS, vol. 8, pp. 485–550. Elsevier, Amsterdam (1995)
Fukushima, M.: A modified Frank-Wolfe algorithm for solving the traffic assignment problem. Transp. Res. 18B, 169–177 (1984)
Patriksson, M., Larsson, T.: Simplicial decomposition with disaggregated representation for the traffic assignment problem. Transp. Sci. 26, 4–17 (1992)
LeBlanc, R.V., Helgason, L.J., Boyce, D.E.: Improved efficiency of the Frank-Wolfe algorithm for convex network programs. Transp. Sci. 19, 445–462 (1985)
Chih-Jen, Lin: On the convergence of the decomposition method for support vector machines. IEEE Trans. Neural Netw. 12(6), 1288–1298 (2001)
Lucidi, S., Palagi, L., Risi, A., Sciandrone, M.: A decomposition algorithm model for singly linearly constrained problems subject to lower and upper bounds. Comput. Optim. Appl. 38, 217–234 (2007)
Marcotte, P., Patriksson, M.: Traffic equilibrium. In: Barnhart, C., Laporte, G. (eds.) Transportation, in the series Handbooks in Operations Research and Management Science. North-Holland, Amsterdam (2007)
Maria, Mitradjieva, Olov, Lindberg Per: The stiff is moving: conjugate direction Frank-Wolfe methods with applications to traffic assignment. Transp. Sci. 47(2), 280–293 (2013)
Nie, Y.: A class of bush-based algorithms for the traffic assignment problem. Transp. Res. B 44, 73–89 (2010)
Patriksson, M.: The Traffic Assignment Problem: Models and Methods. VSP, Zeist (1994)
Patriksson, M.: Algorithms for computing traffic equilibria. Netw. Spat. Econ. 4, 23–34 (2004)
Platt, J.: Fast training of support vector machines using sequential minimal optimization. In: Schoelkopf, B., Burges, C., Smola, A. (eds.) Advances in Kernel Methods: Support Vector Learning. MIT Press, Cambridge (1998)
Acknowledgments
The authors are grateful to one of the two anonymous reviewers for his/her constructive remarks on the computational part that had a significant influence on the work. The authors also thank the Editor-in-Chief Prof. William W. Hager for some useful suggestions.
Author information
Authors and Affiliations
Corresponding author
Appendix: A quadratic line search
Appendix: A quadratic line search
The properties of an Armijo-type line search do not guarantee, without further assumptions on the search direction \(d^k\), that the distance between successive points tends to zero, which is a usual requirement of decomposition methods. Such a property can be satisfied by the line search algorithm described below and based on the acceptance condition
which replaces the Armijo’s condition
Before describing the line search procedure, we state a formal assumption on the sequence of search directions.
Let \(d^k\in R^n\) be a feasible direction at \(x^k\in \mathcal {F}\). Let \(\beta ^k\) be the maximum feasible step length along \(d^k\). Taking, for instance, \(\hat{x}^k\in \mathcal {F}\) and \(d^k=\hat{x}^k-x^k\ne 0,\) it follows \(\beta ^k\ge 1\).
Assumption 1
\(\{d^k\}\) is a sequence of feasible search directions such that
-
(a)
For all \(k\) we have \(\Vert d^k\Vert \le M\) and \(\beta ^k\le \bar{\beta }\) for given numbers \(M>0\) and \(\bar{\beta }>0\);
-
(b)
For all \(k\) we have \( \nabla f(x^k)^Td^k<0\).
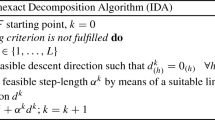
The Quadratic Line Search algorithm can be described as follows.

The properties of Algorithm QLS are stated in the next proposition.
Proposition 5
Let \(\{x^k\}\) be a sequence of points belonging to the feasible set \(\mathcal {F}\), and let \(\{d^k\}\) be a sequence of search directions satisfying Assumption 1. Then:
-
(i)
Algorithm QLS determines, in a finite number of iterations, a scalar \(\alpha ^k\) such that
$$\begin{aligned} f(x^k+\alpha ^k d^k)\le f(x^k)-\gamma (\alpha ^k\Vert d^k\Vert )^2; \end{aligned}$$(29) -
(ii)
If \(\{x^k\}\) converges to \(\bar{x}\) and
$$\begin{aligned} \lim _{k\rightarrow \infty } \left( f(x^k)-f(x^k+\alpha ^kd^k)\right) =0, \end{aligned}$$(30)then we have
$$\begin{aligned} \lim _{k\rightarrow \infty }\alpha ^k\Vert d^k\Vert =0, \end{aligned}$$(31)and
$$\begin{aligned} \lim _{k\rightarrow \infty }\beta ^k\nabla f(x^k)^Td^k=0. \end{aligned}$$(32)
Proof
In order to prove assertion (i), let us assume, by contradiction, that condition of the while cycle is violated for every \(j=0,1,\ldots \). Then, we have for \(j=0,1,\ldots \)
where \(\bar{\alpha }=\min \lbrace \beta ^k,\lambda \rbrace \). Taking limits for \(j\rightarrow \infty \) we obtain:
which contradicts (b) of Assumption 1.
From (29) and (30) it follows that (31) holds.
In order to prove (32), assume by contradiction that there exists an infinite subset \(K\subseteq \{0,1,\ldots \}\) such that
From (33) we get, for \(k\in K\) and \(k\) sufficiently large,
and
for some numbers \(\eta _1,\eta _2 >0\).
Then, (31) and (35) imply that we can write
From (36) and (34) we obtain, for \(k\in K\) and \(k\) sufficiently large,
which implies, recalling the instructions of the algorithm,
From (37), using the Mean Value Theorem, it follows
where \(\xi ^k=x^k+t^k{{\alpha ^k}\over {\delta }}d^k\) and \(t^k\in (0,1)\). Taking the limits for \(k\in K\) and \(k\rightarrow \infty \), recalling (36), we obtain
which contradicts (33).
Rights and permissions
About this article

Cite this article
Di Lorenzo, D., Galligari, A. & Sciandrone, M. A convergent and efficient decomposition method for the traffic assignment problem. Comput Optim Appl 60, 151–170 (2015). https://doi.org/10.1007/s10589-014-9668-6
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10589-014-9668-6