
Abstract
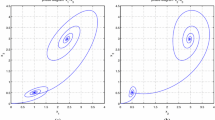
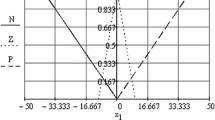
Fuzzy logic and neural networks are two important technologies for modeling and control of dynamical systems and have been constrained by the non-dynamical nature of their some popular architectures. There exist problems such as large rule bases (i.e., curse of dimensionality), long training times, the need to determine buffer lengths. This article proposes to overcome these major problems in phase portrait modeling of a nonlinear system with a dynamic fuzzy network (DFN) with unconstrained connectivity and with dynamic fuzzy processing units called “feurons”. Nonlinear physical system properties can be encapsulated by DFN. As an example, DFN has been used as the modeler for some nonlinear physical system such as chaotic, limit cycle, oscillator. The minimization of an integral quadratic performance index subject to dynamic equality constraints is considered for a phase portrait modeling application. For gradient computation adjoint sensitivity method has been used. Its computational complexity is significantly less than direct sensitivity method, but it requires a backward integration capability. We used first and approximate second order gradient-based methods including Broyden–Fletcher–Golfarb–Shanno algorithm to update the parameters of the dynamic fuzzy networks yielding faster rate of convergence
Similar content being viewed by others

References
J.A. Anderson Rosenfeld. (1988) Neurocomputing: foundation of research MIT Press Cambridge, MA
J. Barhen N. Toomarian S. Gulati (1990) Adjoint operator algorithms for faster learning in dynamical neural networks D.S Touretzky (Eds) Advances In Neural Information Processing Systems 2. Morgan Kaufmann San Mateo, CA
Y. Becerikli A.F. Konar T. Samad (2003) ArticleTitleIntelligent optimal control with dynamic neural networks Neural Networks 16 251–259 Occurrence Handle10.1016/S0893-6080(02)00232-0 Occurrence Handle12628610
Becerikli, Y., Oysal. and Konar. (2004) Trajectory priming with dynamic fuzzy networks in nonlinear optimal control. IEEE Transaction on Neural Networks, 15.
Bryson A.E., Ho Y.C. (1975). Applied optimal control. Hemisphere
Edgar T.F., Himmelblau D.M. (1988). Optimization of Chemical Processes, McGraw-Hill
J.J. Hopfield (1984) ArticleTitleNeurons with graded response have collective computational properties like those of two-state neurons Proceedings of the National Academy of Sciences 81 3088–3092
N. Kasabov Q. Song (2002) ArticleTitleDENFIS: Dynamic evolving neural-fuzzy inference system and its application for time-series prediction IEEE Transaction on Fuzzy Systems 10 144–154 Occurrence Handle10.1109/91.995117
H.K. Khalil (1996) Nonlinear Systems Prentice-Hall NJ
Konar A.F. (1991). Gradient and curvature in nonlinear identification. Proc. Honeywell Advanced Control Workshop, January 21–22
Konar A.F., Samad T. (1992) Dynamic neural networks. Technical report SSDC-92-I 4142–2, Honeywell Technology Center, 3660 Technology Drive, Minneapolis, MN 55418.
Konar A.F., Becerikli Y., Samad T. (1997). Trajectory tracking with dynamic neural networks. IEEE International Symposium On Intelligent Control (ISIC’97), İstanbul
Konar A.F. (1997). Historical and Philosophical Perspectives on Intelligent and Neural Control, IEEE International Symposium On Intelligent Control (ISIC’97), İstanbul
Morris, A. J. (1992) On artificial neural networks in process engineering. IEE Proc. Pt. D. Control Theory and Applications
Y. Oysal Y. Becerikli A.F. Konar (2003) ArticleTitleGeneralized Modelling Principles of A Nonlinear System with A Dynamic Fuzzy Network Computers and Chemical Engineering 27 1657–1664 Occurrence Handle10.1016/S0098-1354(03)00132-7
R. Palm D. Driankov H. Hellendorn (1997) Model based fuzzy control Springer-verlag Germany
K.M. Passino S. Yurkovich (1998) Fuzzy control Addison-Wesley Menlopark, Cal
B. Pearlmutter (1989) ArticleTitleLearning state space trajectories in recurrent neural networks Neural Computation 1 263–269
F.J. Pineda (1987) Generalization of backpropagation to recurrent and higher order neural networks D.Z Anderson (Eds) Proceedings of the IEEE International Conference on Neural Information Systems. Denver NY 602–611
D. Servan-Schreiber A. Cleeremans J.L. McClellans (1988) Encoding sequential structure in simple recurrent networks School of Computer Science, Carnegie Mellon University Pittsburg, PA
D.F. Shanno (1970) ArticleTitleConditioning of Quasi-Newton for function minimization Mathematical Computation 24 647–656
M. Sugeno G.T. Kang (1988) ArticleTitleStructure identification of fuzzy model Fuzzy Sets and Systems 28 15–33 Occurrence Handle10.1016/0165-0114(88)90113-3
T. Takagi M. Sugeno (1985) ArticleTitleFuzzy identification of systems and its applications to modeling and control IEEE Transactions on Systems, Man and Cybernetics 15 116–132
F.-S. Tsung (1990) Learning in recurrent finite difference networks D.S. Touretzky (Eds) et al. Connectionist Models. Proceedings of the 1990 Summer School. Morgan Kaufmann San Mateo, CA
L.X. Wang (1997) A Course in Fuzzy Systems and Control Prentice-Hall International Upper Saddle River, New Jersey
R.J. Williams D. Zipser (1988) A learning algorithm for continually running fully recurrent neural networks University of California San Diego, La Jolla, Ca
S. Wu M.J. Er (2000) ArticleTitleDynamic fuzzy neural networks-a novel approach to function approximation IEEE Transactions Systems on Man and Cybernetics 30 358–364
L.A. Zadeh C.A. Desoer (1963) Linear system theory McGraw-Hill Book Company New York
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Oysal, Y., Becerikli, Y. & Konar, A.F. Phase Portrait Modeling of a Nonlinear System with a Dynamic Fuzzy Network. J Intell Manuf 16, 703–714 (2005). https://doi.org/10.1007/s10845-005-4373-z
Issue Date:
DOI: https://doi.org/10.1007/s10845-005-4373-z