
Abstract
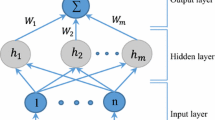
This paper proposes an robust adaptive control method based on Radial Basis Function Neural networks (RBFNN) to investigate the joint position control for periodic motion and predefined trajectory tracking control of two link Cleaning and Detecting Robot Manipulators (CDRM). The proposed control scheme uses a three layer RBFNN to approximate nonlinear robot dynamics. The RBF network is one of the most popular intelligent approaches which has shown a great promise in this sort of problems because of simple network structure and its faster learning capacity. When the RBF networks are used to approximate a nonlinear dynamic system, the control system is stable. In addition, Sliding mode control (SMC) is a well known nonlinear control strategy because of its robustness. A robust term function is selected as an auxiliary controller to guarantee the stability and robustness under various envirorments, such as the mass variation, the external disturbances and modeling uncertainties. The adaptation laws for the weights of the RBFNN are adjusted using the Lyapunov stability theorem, the global stability and robustness of the entire control system are guaranteed, and the tracking errors converge to the required precison, and position is proved. Finally, experiments performed on a two-link CDRM in electric power substation are provided in comparison with proportional differential (PD) and adaptive Fuzzy (AF) control to demonstrate superior tracking precision and robustness of the proposed control methodology.
Similar content being viewed by others

References
Gueaieb, W., Karray, F., Sharhan, S.S.: A robust hybrid intelligent position/force control scheme for cooperative manipulators. IEE Trans. Mechatronics. 12(2), 109–125 (2007)
Kim, E.: Output feedback tracking control of robot manipulators with model uncertainty vis adaptive fuzzy logic. IEEE Trans. Fuzzy Syst. 12(3), 368–378 (2004)
Li, Z.J., Yang, C.G., Tang, Y.: Decentralized adaptive Fuzzy control of Coordinated multiple mobile manipulators interacting with nonrigid environments. IET Control Theory and Application 7(3), 397–410 (2013)
Sun, F.C., Sun, Z.Q., Feng, G.: An adaptive fuzzy controller based on sliding mode for robot manipulators. IEEE Trans. Syst., Man, Cybern. B 29(2), 661–667 (1999)
Peng, J., Wang, Y., Sun, W., Liu, Y.: A neural network sliding mode controller with application to robotic manipulator. IEEE Conf. Int. Control. Autom. 1, 2101–2105 (2006)
Lewis, F.L., Abdallah, C.T., Dawson, E.G.: Control of robot manipulators. Macmillan, New York (1993)
Li, Z. J., Li, J. X., Kang, Y.: Adaptive robust coordinated control of multiple mobile manipulators interacting with rigid environments. Automatica 46, 2028–2034 (2010)
Sun, W., Wang, Y.N.: A robust robotic tracking controller based on neural network. Int. Journal of Robotic and Automation 20(3), 199–204 (2005)
Elshafei, A., Karray, F.: Variable structure based fuzzy logic Identification of a class of nonlinear systems. IEEE Trans. Contr. Sys. Tech. 13(4), 646–653 (2005)
Zhijun, L., Weidong, C.: Adaptive neural- fuzzy control of uncertain contrained multiple coordinated noholonomic Mobile manipulators. Engineering applications of Artificial Intelligence 21 (7), 985–1000 (2008)
Theodoridis, D.C., Boutalis, Y.S., Christodoulou, M.A.: A new adaptive Neural Fuzzy controller for trajectory tracking of robot manipulators. Int. Journal of Robotic and Automation 26(1), 64–75 (2011)
Patino, H.D., Carelli, R., Kuchen, B.R.: Neural networks for advanced control of robot manipulators. IEEE Trans. Neural Networks 13(2), 343–354 (2002)
Patino, H.D., Liu, D.: Neural network- based model reference adaptive control system. IEEE Trans. Syst., Man, Cybem. B 30(1), 198–204 (2000)
Zhijun, L., Yisu, C.: Neural adaptive control of single master multiple slaves teleoperation for coordinated multiple mobile manipulators with time varying communication delays and input uncertainties. IEEE Trans. Neural network and learning system 24(9), 1400–1413 (2013)
Choi, Y.-K., Lee, M.-J., Kim, S., Kay, Y.-C.: Design and implementation of an adaptive neural-network compensator for control system. IEEE Transaction on Industrial Electronics 48(2), 416–423 (2001)
Rovithakis, G.A., Christodoulou, M.A.: Adaptive control of unknown plants using dynamical neural networks. IEEE Trans. Syst., Man, Cybern., to appear (1994)
Kim, Y.H., Lewis, F.L.: Neural network output feedback control of robot manipulators. IEEE Trans. Robot. Automat. 15(2), 301–309 (1999)
Li, Z., Yang, C., Gu, J.: Neural adaptive compliant force/motion control for uncertain constrained wheeled mobile manipulator. Int. Journal of Robotic and Automation 22(3), 206–214 (2007)
Li, Z.J., Xia, Y.Q., Su, C.Y., Deng, J., Fu, J., He, W.: Missile Guidance Law Based on Robust Model Predictive Control Using Neural Network Optimization. IEEE Transactions on Neural Networks and Learning Systems 1(99), 1–8 (2014)
He, W., Ge, S.Z., Li Y.N., Chew E.F., Ng, Y.S.: Neural Network Control of a Rehabilitation Robot by State and Output Feedback. Journal of Intelligent and Robotic Systems, in press (2014)
Yang, Z.R.: A Novel Radial Basis Function Neural Network for Discriminant Analysis. IEEE Trans. Neural Networks 17(3), 604–612 (2006)
Li, Y., Qiang, S., Zhuang, X., Kaynak, O.: Robust and adaptive back-stepping control for nonlinear systems using RBF neural networks. IEEE Trans. Neural Networks 15(3), 693–701 (2004)
Haykin, S.: Neural Networks: A Comprehensive Foundation. Macmillan College Publishing Company, New York (1994)
Mulero-Martinez, J.I.: Robust GRBF static neurocontroller with switch logic for control of robot manipulator. IEEE Trans. Neural Networks and learning systems 23 (7), 1053–1064 (2012)
Lee, C.C., Chung, P.C., Tsai, J.R., Chang, C.I.: Robust radial basis function neural networks. IEEE Trans. Syst., Man, Cybern. B 29(6), 674–685 (1999)
Lee, M., Choi, Y.K.: An adaptive neurocontroller using RBF for robot manipulators. IEEE Trans. Ind. Electron. 51(3), 711–717 (2004)
Tai, N.T., Ahn, K.K.: A RBF Neural Network Sliding Mode Controller for SMA Actuator. International Journal of Control, Automation, and Systems. 6(6), 1296–1305 (2010)
Seshagiri, S., Khail, H.K.: Output feedback control of nonlinear systems using RBF neural networks. IEEE Trans. Neural Networks 11(2), 69–79 (2000)
Zhihong, M., Wu, H.R., Palaniswami, M.: An adaptive tracking controller using neural networks for a class of nonlinear systems. IEEE Trans. Neural Networks 9(5), 947–955 (1998)
Rojko, A., Jezernik, K.: Sliding mode motion controller with adaptive fuzzy disturbance estimation. IEEE Trans. Ind. Electron. 51(5), 963–971 (2004)
Bandyopadhyay, B., Gandhi, P.S., Kurode, S.: Sliding mode observer based sliding mode controller for slosh free motion through PID scheme. IEEE Trans. Ind. Electron. 56(9), 3432–3442 (2009)
Fallaha, C.J., Saad, M., Kanaan, H.Y., Al-Haddad, K.: Sliding-mode robot control with exponential reaching law. IEEE Trans. Ind. Electron. 58(2), 600–610 (2011)
Yildiz, Y., Sabanovic, A., Abidi, K.: Sliding-Mode Neuro-Controller for Uncertain Systems. IEEE Trans. Ind. Electron. 54(3), 1676–1685 (2007)
Veluvolu, K.C., Soh, Y.C.: High-gain observers with sliding mode for state and unknown input estimation. IEEE Trans. Ind. Electron. 56(9), 3386–3393 (2009)
Islam, S., Liu, P.X.: Robust Sliding Mode Control for robot manipulator. IEEE Trans. Ind. Electronics. 58(6), 2444–2453 (2011)
Tsay, T.I.J., Huang, J.H.: Robust nonlinear control of robot manipulators. Proc. IEEE Int. Conf. Robot. Autom. 3, 2083–2088 (1994)
Park, J.S., Han, G.S., Ahn, H.S., Kim, D.H.: Adaptive approaches on the sliding mode control of robot manipulators. Transactions on Control, Automation and systems Engineering 3(1), 15–20 (2001)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Van Pham, C., Wang, Y.N. Robust Adaptive Trajectory Tracking Sliding mode control based on Neural networks for Cleaning and Detecting Robot Manipulators. J Intell Robot Syst 79, 101–114 (2015). https://doi.org/10.1007/s10846-014-0162-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-014-0162-2