
Abstract
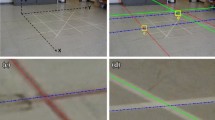
We show how the classical theory of projective conics provides new insights and results on the problem of 3D reconstruction from two images taken with uncalibrated cameras. The close relationship between Kruppa equations and Poncelet’s Porism is investigated, leading, in particular, to a closed-form geometrically meaningful parameterization of the set of Euclidean reconstructions compatible with two images taken with cameras with constant intrinsic parameters and known pixel shape. An experiment with real images, showing the applicability of the method, is included.
Similar content being viewed by others

References
Bougnoux, S.: From projective to Euclidean space under any practical situation, a criticism of self-calibration. In: Sixth International Conference on Computer Vision, pp. 790–796, 1998
Hartley, R.: Estimation of Relative Camera Positions for Uncalibrated Cameras. Lecture Notes In Computer Science, vol. 588. Proceedings of the Second European Conference on Computer Vision, pp. 579–587, 1992
Hartley, R., Zisserman, A.: Multiple-View Geometry in Computer Vision. Cambridge Univ. Press, Cambridge (2000)
Huang, C.-R., Chen, C.-S., Chung, P.-C.: An improved algorithm for two-image camera self-calibration and Euclidean structure recovery using absolute quadric. Pattern Recognit. 37(8), 1713–1722 (2004)
Liu, J.S., Chuang, J.H.: Self-calibration with varying focal length from two images obtained by a stereo head. Pattern Recognit. 35, 2937–2948 (2002)
Maybank, S., Faugeras, O.: A theory of self–calibration of a moving camera. Int. J. Comput. Vis. 8(2), 123–141 (1992)
Newsam, G.N., Huynh, D.Q., Brooks, M.J., Pan, H.P.: Recovering unknown focal lengths in self-calibration: an essentially linear algorithm and degenerate configurations. In: ISPRS-Congress XXXI (B3), pp. 575–580, 1996
Nister, D., Schaffalitzky, F.: What do four Points in two calibrated images tell us about the epipoles? In: Pajdla, T., Matas, J. (Eds.) ECCV 2004, LNCS 3022, pp. 41–57, Springer
Ponce, J., McHenry, K., Papadopoulo, T., Teillaud, M., Triggs, B.: On the absolute quadratic complex and its application to autocalibration. In: Proc. IEEE Conference on Computer Vision and Pattern Recognition, vol. I, pp. 780–787, San Diego, CA, June 2005
Quan, L.: Conic reconstruction and correspondence from two views. IEEE Trans. Pattern Anal. Mach. Intell. 18(2), 151–160 (1996)
Semple, J.G., Kneebone, G.T.: Algebraic Projective Geometry. Oxford University Press, London (1998)
Sturm, P.: Focal length calibration from two views: method and analysis of singular cases. Comput. Vis. Image Underst. 99(1), 58–95 (2005)
Valdés, A., Ronda, J.I., Gallego, G.: The absolute line quadric and camera autocalibration. Int. J. Comput. Vis. 66(3), 283–303 (2006)
Author information
Authors and Affiliations
Corresponding author
Additional information
This work has been partially supported by the Ministerio de Educación y Ciencia of the Spanish Government under project TIN2004-07860 (Medusa) and by the Comunidad de Madrid under project S-0505/TIC-0223 (Pro-Multidis).
Rights and permissions
About this article
Cite this article
Ronda, J.I., Valdés, A. Conic Geometry and Autocalibration from Two Images. J Math Imaging Vis 28, 135–149 (2007). https://doi.org/10.1007/s10851-007-0011-z
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10851-007-0011-z