
Abstract
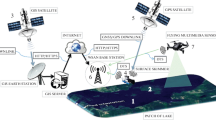
In this study, a marine robotic system is designed to locate and to quantify the surface water pollution in lakes and ponds with the consideration of the influences of neighboring buildings and trees. The proposed system consists of an aerial robot and a marine robot, which are actuated by pattern recognition at the base station with safe path planning. In the designed system,on quadrotor a Forward Looking Infra Red (FLIR) thermal imaging camera is employed to spot oil spills following a neural network method, while a wireless digital camera is used to identify the apropos path by imparting edge detection techniques. The surrounding buildings and trees dysfunction the digital camera’s reflectivity, thereby disparate from optimal path planning. To dwindle the experimental impediment, the Voronoi algorithm is employed by fractionating the experiment’s domain into small sub-sections. After that, Dijkstra’s algorithm is considered to assure the optimal path planning from the starting point to the target. Fuzzy logic is introduced to direct boats towards the target. Global positioning system (GPS), sonar and navigation sensors based boat follow the trajectory defined by the aerial robot towards target point and take samples for quantification test through the spectrometer. These results then sent to the base station for pattern recognition using neural networks. Such systems can efficiently and effectively navigate the water pollution problems as disaster response.















Similar content being viewed by others

References
Zahugi, E. M. H., Shanta M. M., & Prasad T. V. (2012). Oil spill cleaning up using swarm of robots. In Proceedings of the second international conference on advances in computing and information technology (ACITY), Chennai, India, pp. 215–224.
Aznar, F., Sempere, M., Pujol, M., Rizo, R., & Pujol, M. J. (2014). Modelling oil-spill detection with swarm drones. Abstract and Applied Analysis,2014, 1–14.
Fingas, M., & Brown, C. E. (2017). A review of oil spill remote sensing. Sensors,18, 91.
Pinto, J., Athanassiou, A., & Fragouli, D. (2018). Surface modification of polymeric foams for oil spills remediation. Journal of Environmental Management,206, 872–889.
Jha, M. N., Levy, J., & Gao, Y. (2008). Advances in remote sensing for oil spill disaster management: state-of-the-art sensors technology for oil spill surveillance. Sensors (Basel),8, 236–255.
Zhang, B., Li, X., Perrie, W., & He, Y. (2015). Synergistic measurements of ocean winds and waves from SAR. Journal of Geophysical Research: Oceans,120, 6164–6184.
Brekke, C., & Solberg, A. H. S. (2005). Oil spill detection by satellite remote sensing. Remote Sensing of Environment,95, 1–13.
Tseng, W. Y., & Chiu, L. S. (1994). AVHRR observations of Persian Gulf oil spills. In Proceedings of the international geoscience and remote sensing symposium, Pasadena, California, pp. 779–782.
Hu, C., Miiller-Karger, F. E., Taylor, C. J., Myhre, D., Murch, B., & Odriozola, A. L. (2003). MODIS detects oil spills in Lake Maracaibo, Venezuela. Eos, Transactions American Geophysical Union,84, 313–319.
Hu, C., Li, X., Pichel, W. G., & Muller-Karger, F. E. (2009). Detection of natural oil slicks in the NW Gulf of Mexico using MODIS imagery. Geophysical Research Letters,36, L01604.
Zhao, J., Temimi, M., Ghedira, H., & Hu, C. (2014). Exploring the potential of optical remote sensing for oil spill detection in shallow coastal waters—A case study in the Arabian Gulf. Optics Express,22, 13755–13772.
Li, W. (1995). A hybrid neuro-fuzzy system for sensor based robot navigation in unknown environments. In Proceedings of the 1995 American control conference, pp. 2749–2753.
Godjevac, J., & Steele, N. (1999). Neuro-fuzzy control of a mobile robot. Neurocomputing,28, 127–143.
Joshi, M. M., & Zaveri, M. A. (2010). Neuro-fuzzy based autonomous mobile robot navigation system. In 11th International conference on control automation robotics & vision, Singapore, pp. 384–389.
Mohanty, P. K., & Parhi, D. R. (2014). A new intelligent motion planning for mobile robot navigation using multiple adaptive neuro-fuzzy inference system. Applied Mathematics & Information Sciences,8, 2527–2535.
Mon, Y.-J. (2015). WSN—Based indoor location identification system (LIS) applied to vision robot designed by fuzzy neural network. Journal of Digital Information Management,13, 36–41.
Lakhmissi, C. (2015). Comparison between fuzzy, neural and neuro-fuzzy controllers for mobile robot path tracking. In 3rd International conference on control, engineering & information technology, Tlemcen, Algeria, pp. 1–6.
Hossain, M. E., Turna, T. N., Soheli, S. J., & Kaiser, M. S. (2014). Neuro-fuzzy(NF)-based adaptive flood warning system for Bangladesh, Presented at the 3rd international conference on informatics, electronics & vision.
Shaohui, F., Kok-Meng, L., & Kun, B. (2012). Harnessing embedded magnetic fields for angular sensing with nanodegree accuracy. IEEE/ASME Transactions on Mechatronics,17, 687–696.
Chih-Lyang, H., Chien-Wu, L., & Ying-Jer, C. (2013). Search, track, and kick to virtual target point of humanoid robots by a neural-network-based active embedded vision system. IEEE Systems Journal,9, 107–118.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Mushtaq, Z., Ali, I., Shah, R. et al. Detection, Localization and Analysis of Oil Spills in Water Through Wireless Thermal Imaging and Spectrometer Based Intelligent System. Wireless Pers Commun 111, 679–698 (2020). https://doi.org/10.1007/s11277-019-06880-3
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11277-019-06880-3