
Abstract
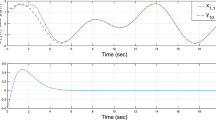
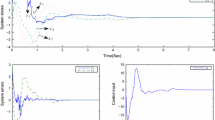
This paper investigates a global asymptotic regulation control problem for a class of nonlinear systems with dynamic uncertainties. The requirement of a priori knowledge of control directions is removed and the inverse dynamics satisfy the weaker integral input-to-state stable condition. By application of the changing supply rates and the Nussbaum-type gain techniques, a partial state-feedback regulator is constructed. The main results demonstrate that the designed controller ensures the system state converges to the origin whereas the other signals of the closed-loop system are bounded. Simulation results are illustrated to show the effectiveness of the proposed approach.
Similar content being viewed by others

References
E. D. Sontag, Smooth stabilization implies comprime factorization, IEEE Transactions on Automatic Control, 1989, 34(3): 435–443.
M. Krstić, I. Kanellakopoulos, and P. V. Kokotović, Nonlinear and Adaptive Control Design, Wiley, New York, 1995.
R. Sepulchre, M. Janković, and P. V. Kokotović, Integrator forwarding: A new recursive nonlinear robust design, Automatica, 1997, 33(5): 979–984.
S. J. Liu, J. F. Zhang, and Z. P. Jiang, A notion of stochastic input-to-state stability and its application to stability of cascaded stochastic nonlinear systems, Acta Mathematicae Applicatae Sinica (English Series), 2008, 24(1): 141–156.
S. J. Liu, Controller design for stochastic nonlinear systems and performance analysis of the closed-loop systems, Chinese Academy of Science, 2007.
E. D. Sontag, Comments on integral variants of ISS, Systems and Control Letters, 1998, 34(1–2): 93–100.
Z. P. Jiang, I. Mareels, D. J. Hill, and J. Huang, A unifying framework for global regulation via nonlinear output feedback from ISS to iISS, IEEE Transactions on Automatic Control, 2004, 49(4): 549–562.
Z. T. Ding, Adaptive control of nonlinear systems with unknown control directions, International Journal of Adaptive Control and Signal Process, 2000, 14(5): 505–517.
D. Angeli, E. D. Sontag, and Y. Wang, A characterization of integral input to state stability, IEEE Transactions on Automatic Control, 2000, 45(7): 1082–1087.
B. Martesson, Remarks on adaptive stabilization of first order nonlinear systems, Systems and Control Letters, 1990, 14(1): 1–7.
Y. G. Liu, Output-feedback adaptive control for a class of nonlinear systems with unknown control directions, Acta Automatica Sinica, 2007, 33(12): 1306–1312.
C. L. Wei, Q. D. Wang, and Y. Q. Wu, Robust adaptive control of high order nonlinear systems with unknown control directions, Journal of Control Theory and Applications, 2007, 24(4): 519–524.
Z. P. Jiang and I. Mareels, Robust nonlinear integral control, IEEE Transactions on Automatic Control, 2001, 46(8): 1336–1342.
H. K. Khalil, Nonlinear Systems, 3rd Edition, Upper Saddle River, NJ: Prentice-Hall, 2002.
E. D. Sontag and Y. Wang, On characterizations of the input-to-state stability property, Systems and Control Letters, 1995, 24(5): 351–359.
E. D. Sontag and A. R. Teel, Changing supply rates in input-to-state stable system, IEEE Transactions on Automatic Control, 1995, 40(10): 1476–1478.
C. L. Wei, Robust adaptive control for uncertain high-order nonlinear systems, Southeast University, 2007.
X. D. Ye, Asymptotic regulation of time-varying uncertain nonlinear systems with unknown control directions, Automatica, 1999, 35(5): 929–935.
Author information
Authors and Affiliations
Corresponding author
Additional information
This research is supported by the National Natural Science Foundation of China under Grant Nos. 60674027, 60974127, and 60904022, the Key Project Foundation of the Educational Ministry under Grant No. 208074, and the Innovation Program of Graduate Students of Jiangsu Province of China under Grant No. CXZZ11 0155.
This paper was recommended for publication by Editor Yiguang HONG.
Rights and permissions
About this article
Cite this article
Yu, J., Wu, Y. Global asymptotic regulation control for nonlinear systems with iISS inverse dynamics. J Syst Sci Complex 25, 249–261 (2012). https://doi.org/10.1007/s11424-011-9095-z
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11424-011-9095-z