
Abstract
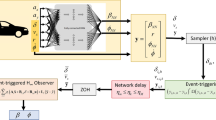
In this paper, an event-triggered neural network control method is proposed for autonomous surface vehicles subject to uncertainties and input constraints over wireless network. An event-triggered mechanism with three logic rules is employed to determine the wireless data transmission of states and control inputs. An event-driven neural network is applied to approximate the uncertainties using aperiodic sampled states. In addition, a predictor is employed to update the weights of neural network. An event-based bounded kinetic control law is applied to address the actuator constraints. The advantage of the proposed event-triggered neural network control approach is that the network traffic can be reduced while guaranteeing system stability and speed following performance. The closed-loop control system is proved to be input-to-state stable via cascade theory. The Zeno behavior can be avoided via the proposed event-triggered neural network control approach. A simulation example is provided to demonstrate the effectiveness of the proposed event-triggered neural network control approach for autonomous surface vehicles.
Similar content being viewed by others

References
Fossen T I. Handbook of marine craft hydrodynamics and motion control. IEEE Control Syst, 2016, 36: 78–79
Tee K P, Ge S S. Control of fully actuated ocean surface vessels using a class of feedforward approximators. IEEE Trans Contr Syst Technol, 2006, 14: 750–756
Liu L, Wang D, Peng Z H, et al. Saturated coordinated control of multiple underactuated unmanned surface vehicles over a closed curve. Sci China Inf Sci, 2017, 60: 070203
Dai S L, He S D, Lin H, et al. Platoon formation control with prescribed performance guarantees for USVs. IEEE Trans Ind Electron, 2018, 65: 4237–4246
Peng Z H, Wang D, Li T S. Predictor-based neural dynamic surface control for distributed formation tracking of multiple marine surface vehicles with improved transient performance. Sci China Inf Sci, 2016, 59: 092210
Hovakimyan N, Nardi F, Calise A, et al. Adaptive output feedback control of uncertain nonlinear systems using single-hidden-layer neural networks. IEEE Trans Neural Netw, 2002, 13: 1420–1431
Peng Z H, Wang J, Wang D. Distributed containment maneuvering of multiple marine vessels via neurodynamics-based output feedback. IEEE Trans Ind Electron, 2017, 64: 3831–3839
Dai S L, Wang M, Wang C, et al. Learning from adaptive neural network output feedback control of uncertain ocean surface ship dynamics. Int J Adapt Control Signal Process, 2014, 28: 341–365
Dai S L, He S D, Wang M, et al. Adaptive neural control of underactuated surface vessels with prescribed performance guarantees. IEEE Trans Neural Netw Learn Syst, 2018. doi: https://doi.org/10.1109/TNNLS.2018.2876685
Zhao Z, He W, Ge S S. Adaptive neural network control of a fully actuated marine surface vessel with multiple output constraints. IEEE Trans Contr Syst Technol, 2014, 22: 1536–1543
Abdelatti M, Yuan C Z, Zeng W, et al. Cooperative deterministic learning control for a group of homogeneous nonlinear uncertain robot manipulators. Sci China Inf Sci, 2018, 61: 112201
Peng Z H, Wang D, Wang J. Cooperative dynamic positioning of multiple marine offshore vessels: a modular design. IEEE/ASME Trans Mechatron, 2016, 21: 1210–1221
Zheng Z, Feroskhan M. Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances. IEEE/ASME Trans Mechatron, 2017, 22: 2564–2575
Peng Z H, Wang J, Han Q L. Path-following control of autonomous underwater vehicles subject to velocity and input constraints via neurodynamic optimization. IEEE Trans Ind Electron, 2019, 66: 8724–8732
Xia R S, Wu Q X, Chen M. Disturbance observer-based optimal longitudinal trajectory control of near space vehicle. Sci China Inf Sci, 2019, 62: 050212
Ashrafiuon H, Muske K R, McNinch L C, et al. Sliding-mode tracking control of surface vessels. IEEE Trans Ind Electron, 2008, 55: 4004–4012
Cui R X, Zhang X, Cui D. Adaptive sliding-mode attitude control for autonomous underwater vehicles with input nonlinearities. Ocean Eng, 2016, 123: 45–54
Xiang X B, Liu C, Su H S, et al. On decentralized adaptive full-order sliding mode control of multiple UAVs. ISA Trans, 2017, 71: 196–205
Yang Y S, Zhou C J, Ren J S. Model reference adaptive robust fuzzy control for ship steering autopilot with uncertain nonlinear systems. Appl Soft Comput, 2003, 3: 305–316
Xiang X B, Yu C Y, Zhang Q. Robust fuzzy 3D path following for autonomous underwater vehicle subject to uncertainties. Comput Oper Res, 2017, 84: 165–177
Chen Z Y, Huang J. Attitude tracking and disturbance rejection of rigid spacecraft by adaptive control. IEEE Trans Automat Contr, 2009, 54: 600–605
Skjetne R, Fossen T I, Kokotović P V. Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica, 2005, 41: 289–298
Qin H D, Chen H, Sun Y C, et al. The distributed adaptive finite-time chattering reduction containment control for multiple ocean bottom flying nodes. Int J Fuzzy Syst, 2019, 21: 607–619
Chen Z Y. A novel adaptive control approach for nonlinearly parameterized systems. Int J Adapt Control Signal Process, 2015, 29: 81–98
Albattat A, Gruenwald B, Yucelen T. Design and analysis of adaptive control systems over wireless networks. J Dynamic Syst Measurement Control, 2017, 139: 074501
Sahoo A, Xu H, Jagannathan S. Neural network-based event-triggered state feedback control of nonlinear continuous-time systems. IEEE Trans Neural Netw Learn Syst, 2016, 27: 497–509
Albattat A, Gruenwald B C, Yucelen T. On event-triggered adaptive architectures for decentralized and distributed control of large-scale modular systems. Sensors, 2016, 16: 1297
Li H P, Shi Y. Event-triggered robust model predictive control of continuous-time nonlinear systems. Automatica, 2014, 50: 1507–1513
Heemels W P M H, Donkers M C F. Model-based periodic event-triggered control for linear systems. Automatica, 2013, 49: 698–711
Xu W Y, Wang Z D, Ho D W C. Finite-horizon H∞ consensus for multiagent systems with redundant channels via an observer-type event-triggered scheme. IEEE Trans Cybern, 2018, 48: 1567–1576
Zhang Z Q, Hao F, Zhang L, et al. Consensus of linear multi-agent systems via event-triggered control. Int J Control, 2014, 87: 1243–1251
Xu W Y, Chen G R, Ho D W C. A layered event-triggered consensus scheme. IEEE Trans Cybern, 2017, 47: 2334–2340
Peng Z H, Wang J S, Wang J. Constrained control of autonomous underwater vehicles based on command optimization and disturbance estimation. IEEE Trans Ind Electron, 2019, 66: 3627–3635
Harmouche M, Laghrouche S, Chitour Y. Global tracking for underactuated ships with bounded feedback controllers. Int J Control, 2014, 47: 1–9
Wang H, Wang D, Peng Z H. Adaptive dynamic surface control for cooperative path following of marine surface vehicles with input saturation. Nonlin Dyn, 2014, 77: 107–117
Zheng Z W, Sun L. Error-constrained path-following control for a stratospheric airship with actuator saturation and disturbances. Int J Syst Sci, 2017, 48: 3504–3521
Zheng Z W, Huang Y T, Xie L H, et al. Adaptive trajectory tracking control of a fully actuated surface vessel with asymmetrically constrained input and output. IEEE Trans Contr Syst Technol, 2018, 26: 1851–1859
Lavretsky E, Gibson T E. Projection operator in adaptive systems. 2011. ArXiv: 1112.4232
Krstic M, Kokotovic P V, Kanellakopoulos I. Nonlinear and Adaptive Control Design. New York: John Wiley & Sons, 1995
Acknowledgements
This work was supported in part by National Natural Science Foundation of China (Grant Nos. 61673081, 51979020, 51909021, 51579023), Training Program for High-level Technical Talent in Transportation Industry (Grant No. 2018-030), Innovative Talents in Universities of Liaoning Province (Grant No. LR2017014), Science and Technology Fund for Distinguished Young Scholars of Dalian (Grant No. 2018RJ08), Stable Supporting Fund of Science and Technology on Underwater Vehicle Technology (Grant No. JCKYS2019604SXJQR-01), Fundamental Research Funds for the Central Universities (Grant No. 3132019319), and China Postdoctoral Science Foundation (Grant No. 2019M650086).
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Lv, M., Wang, D., Peng, Z. et al. Event-triggered neural network control of autonomous surface vehicles over wireless network. Sci. China Inf. Sci. 63, 150205 (2020). https://doi.org/10.1007/s11432-019-2679-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11432-019-2679-5