
Abstract
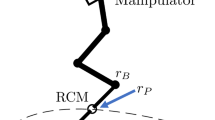
In this paper, we propose a recurrent neural network (RNN) for the tracking control of surgical robots while satisfying remote center-of-motion (RCM) constraints. RCM constraints enforce rules suggesting that the surgical tip should not go beyond the region of incision while tracking the commands of the surgeon. Violations of RCM constraints can result in serious injury to the patient. We unify the RCM constraints with the tracing control by formulating a single constrained optimization problem using a penalty-term approach. The penalty-term actively rewards the optimizer for satisfying the RCM constraints. We then propose an RNN-based metaheuristic optimization algorithm called “Beetle Antennae Olfactory Recurrent Neural Network (BAORNN)” for solving the formulated optimization problem in real time. The proposed control framework can track the surgeon’s commands and satisfy the RCM constraints simultaneously. Theoretical analysis is performed to demonstrate the stability and convergence of the BAORNN algorithm. Simulations using LBR IIWA14, a 7-degree-of-freedom robotic arm, are performed to analyze the performance of the proposed framework.
Similar content being viewed by others
References
Yang C, Jiang Y, Li Z, et al. Neural control of bimanual robots with guaranteed global stability and motion precision. IEEE Trans Ind Inf, 2017, 13: 1162–1171
Liu Y J, Tong S. Adaptive NN tracking control of uncertain nonlinear discrete-time systems with nonaffine dead-zone input. IEEE Trans Cybern, 2015, 45: 497–505
Hu G, Gans N, Fitz-Coy N, et al. Adaptive homography-based visual servo tracking control via a quaternion formulation. IEEE Trans Contr Syst Technol, 2010, 18: 128–135
Yang C, Zeng C, Cong Y, et al. A learning framework of adaptive manipulative skills from human to robot. IEEE Trans Ind Inf, 2019, 15: 1153–1161
La H M, Dinh T H, Pham N H, et al. Automated robotic monitoring and inspection of steel structures and bridges. Robotica, 2019, 37: 947–967
Yang C, Peng G, Cheng L, et al. Force sensorless admittance control for teleoperation of uncertain robot manipulator using neural networks. IEEE Trans Syst Man Cybern Syst, 2019. doi: https://doi.org/10.1109/TSMC.2019.2920870
Kim U, Lee D H, Kim Y B, et al. S-surge: novel portable surgical robot with multiaxis force-sensing capability for minimally invasive surgery. IEEE/ASME Trans Mechatron, 2017, 22: 1717–1727
Aghakhani N, Geravand M, Shahriari N, et al. Task control with remote center of motion constraint for minimally invasive robotic surgery. In: Proceedings of 2013 IEEE International Conference on Robotics and Automation, 2013. 5807–5812
Kuo C H, Dai J S. Kinematics of a fully-decoupled remote center-of-motion parallel manipulator for minimally invasive surgery. J Med Dev, 2012, 6: 021008
Jin L, Li S, Luo X, et al. Neural dynamics for cooperative control of redundant robot manipulators. IEEE Trans Ind Inf, 2018, 14: 3812–3821
La H M, Sheng W. Multi-agent motion control in cluttered and noisy environments. J Commun, 2013, 8: 32–46
La H M. Multi-robot swarm for cooperative scalar field mapping. In: Proceedings of Handbook of Research on Design, Control, and Modeling of Swarm Robotics, 2016. 383–395
La H M, Lim R, Sheng W. Multirobot cooperative learning for predator avoidance. IEEE Trans Contr Syst Technol, 2015, 23: 52–63
Khan A H, Li S, Luo X. Obstacle avoidance and tracking control of redundant robotic manipulator: an RNN-based meta-heuristic approach. IEEE Trans Ind Inf, 2020, 16: 4670–4680
Guo D, Zhang Y. Acceleration-level inequality-based MAN scheme for obstacle avoidance of redundant robot manipulators. IEEE Trans Ind Electron, 2014, 61: 6903–6914
Tevatia G, Schaal S. Inverse kinematics for humanoid robots. In: Proceedings of IEEE International Conference on Robotics and Automation Symposia Proceedings, 2000. 294–299
Chen G, Wang J, Wang H. A new type of planar two degree-of-freedom remote center-of-motion mechanism inspired by the peaucellier-lipkin straight-line linkage. J Mech Des, 2019, 141: 015001
Nisar S, Endo T, Matsuno F. Design and optimization of a 2-degree-of-freedom planar remote center of motion mechanism for surgical manipulators with smaller footprint. Mechanism Machine Theor, 2018, 129: 148–161
Ortmaier T, Hirzinger G. Cartesian control issues for minimally invasive robot surgery. In: Proceedings of 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2000. 565–571
Sandoval J, Poisson G, Vieyres P. A new kinematic formulation of the RCM constraint for redundant torque-controlled robots. In: Proceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017. 4576–4581
Sandoval J, Poisson G, Vieyres P. Improved dynamic formulation for decoupled cartesian admittance control and RCM constraint. In: Proceedings of 2016 IEEE International Conference on Robotics and Automation (ICRA), 2016. 1124–1129
Yang D, Wang L, Xie Y, et al. Optimization-based inverse kinematic analysis of an experimental minimally invasive robotic surgery system. In: Proceedings of 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2015. 1427–1432
Su H, Shuai L, Jagadesh M, et al. Manipulability optimization control of a serial redundant robot for robot-assisted minimally invasive surgery. In: Proceedings of IEEE International Conference on Robotics and Automation, 2019. 1–6
Lai W, Cao L, Xu Z, et al. Distal end force sensing with optical fiber bragg gratings for tendon-sheath mechanisms in flexible endoscopic robots. In: Proceedings of 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018. 1–5
Bruno D, Calinon S, Caldwell D G. Learning autonomous behaviours for the body of a flexible surgical robot. Auton Robot, 2017, 41: 333–347
Calinon S, Bruno D, Malekzadeh M S, et al. Human-robot skills transfer interfaces for a flexible surgical robot. Comput Methods Programs Biomed, 2014, 116: 81–96
Xu K, Simaan N. Actuation compensation for flexible surgical snake-like robots with redundant remote actuation. In: Proceedings of IEEE International Conference on Robotics and Automation, 2006. 4148–4154
Li S, Chen S, Liu B, et al. Decentralized kinematic control of a class of collaborative redundant manipulators via recurrent neural networks. Neurocomputing, 2012, 91: 1–10
Jin L, Li S, La H M, et al. Manipulability optimization of redundant manipulators using dynamic neural networks. IEEE Trans Ind Electron, 2017, 64: 4710–4720
Yang C, Wu H, Li Z, et al. Mind control of a robotic arm with visual fusion technology. IEEE Trans Ind Inf, 2018, 14: 3822–3830
He W, Huang H, Ge S S. Adaptive neural network control of a robotic manipulator with time-varying output constraints. IEEE Trans Cybern, 2017, 47: 3136–3147
Wang H, Chen B, Lin C. Adaptive neural tracking control for a class of stochastic nonlinear systems. Int J Robust Nonlin Control, 2014, 24: 1262–1280
Xiao L, Li S, Lin F J, et al. Zeroing neural dynamics for control design: comprehensive analysis on stability, robustness, and convergence speed. IEEE Trans Ind Inf, 2019, 15: 2605–2616
Wang H, Liu X, Liu K. Robust adaptive neural tracking control for a class of stochastic nonlinear interconnected systems. IEEE Trans Neural Netw Learn Syst, 2016, 27: 510–523
Jing L D, Zhang J F. Tracking control and parameter identification with quantized ARMAX systems. Sci China Inf Sci, 2019, 62: 199203
Liao B, Liu W. Pseudoinverse-type bi-criteria minimization scheme for redundancy resolution of robot manipulators. Robotica, 2015, 33: 2100–2113
Jin L, Zhang Y. Discrete-time zhang neural network of O(τ3) pattern for time-varying matrix pseudoinversion with application to manipulator motion generation. Neurocomputing, 2014, 142: 165–173
Liegeois A. Automatic supervisory control of the configuration and behavior of multibody mechanisms. IEEE Trans Syst Man Cybern, 1977, 7: 868–871
Zanchettin A M, Bascetta L, Rocco P. Achieving humanlike motion: resolving redundancy for anthropomorphic industrial manipulators. IEEE Robot Automat Mag, 2013, 20: 131–138
Cha S H, Lasky T A, Velinsky S A. Kinematic redundancy resolution for serial-parallel manipulators via local optimization including joint constraints. Mech Based Des Struct Mach, 2006, 34: 213–239
Cavallo A, Russo A, Canciello G. Hierarchical control for generator and battery in the more electric aircraft. Sci China Inf Sci, 2019, 62: 192207
Ding H, Tso S K. A fully neural-network-based planning scheme for torque minimization of redundant manipulators. IEEE Trans Ind Electron, 1999, 46: 199–206
He W, Yan Z, Sun Y, et al. Neural-learning-based control for a constrained robotic manipulator with flexible joints. IEEE Trans Neural Netw Learn Syst, 2018, 29: 5993–6003
Wang H, Liu P X, Bao J, et al. Adaptive neural output-feedback decentralized control for large-scale nonlinear systems with stochastic disturbances. IEEE Trans Neural Netw Learn Syst, 2019,: 1–12
Na J, Ren X M, Zheng D D. Adaptive control for nonlinear pure-feedback systems with high-order sliding mode observer. IEEE Trans Neural Netw Learn Syst, 2013, 24: 370–382
He W, Yin Z, Sun C. Adaptive neural network control of a marine vessel with constraints using the asymmetric barrier lyapunov function. IEEE Trans Cybern, 2017, 47: 1641–1651
Yang C, Jiang Y, Na J, et al. Finite-time convergence adaptive fuzzy control for dual-arm robot with unknown kinematics and dynamics. IEEE Trans Fuzzy Syst, 2019, 27: 574–588
Na J, Jing B, Huang Y, et al. Unknown system dynamics estimator for motion control of nonlinear robotic systems. IEEE Trans Ind Electron, 2020, 67: 3850–3859
Wang H, Liu X P, Xie X, et al. Adaptive fuzzy asymptotical tracking control of nonlinear systems with unmodeled dynamics and quantized actuator. Inf Sci, 2018. doi: https://doi.org/10.1016/j.ins.2018.04.011
Yang C, Jiang Y, He W, et al. Adaptive parameter estimation and control design for robot manipulators with finite-time convergence. IEEE Trans Ind Electron, 2018, 65: 8112–8123
Na J, Mahyuddin M N, Herrmann G, et al. Robust adaptive finite-time parameter estimation and control for robotic systems. Int J Robust Nonlin Control, 2015, 25: 3045–3071
Wang H, Liu P X, Zhao X, et al. Adaptive fuzzy finite-time control of nonlinear systems with actuator faults. IEEE Trans Cybern, 2020, 50: 1786–1797
Li M, Kapoor A, Taylor R H. A constrained optimization approach to virtual fixtures. In: Proceedings of 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2005. 1408–1413
Parejo J A, Ruiz-Corté A, Lozano S, et al. Metaheuristic optimization frameworks: a survey and benchmarking. Soft Comput, 2012, 16: 527–561
Yang X-S. Engineering Optimization: An Introduction With Metaheuristic Applications. Hoboken: John Wiley & Sons, 2010
Ren Z, Li P, Fang J, et al. SBA: an efficient algorithm for address assignment in zigbee networks. Wirel Pers Commun, 2013, 71: 719–734
Fang J, Zhang L, Li H. Two-dimensional pattern-coupled sparse Bayesian learning via generalized approximate message passing. IEEE Trans Image Process, 2016, 25: 2920–2930
Fang J, Li H B. Distributed estimation of Gauss-Markov random fields with one-bit quantized data. IEEE Signal Process Lett, 2010, 17: 449–452
Fang J, Shen Y, Li F, et al. Support knowledge-aided sparse Bayesian learning for compressed sensing. In: Proceedings of 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2015. 3786–3790
Jiang X, Li S. BAS: beetle antennae search algorithm for optimization problems. 2017. ArXiv: 1710.10724
Zhang Y, Li S, Xu B. Convergence analysis of beetle antennae search algorithm and its applications. 2019. ArXiv: 1904.02397
Zhu Z, Zhang Z, Man W, et al. A new beetle antennae search algorithm for multi-objective energy management in microgrid. In: Proceedings of the 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), 2018. 1599–1603
Yin X, Ma Y. Aggregation service function chain mapping plan based on beetle antennae search algorithm. In: Proceedings of the 2nd International Conference on Telecommunications and Communication Engineering, 2018. 225–230
Zhang Y, Li S, Zou J, et al. A passivity-based approach for kinematic control of redundant manipulators with constraints. IEEE Trans Ind Inf, 2020, 16: 3029–3038
Chen D, Zhang Y, Li S. Tracking control of robot manipulators with unknown models: a jacobian-matrix-adaption method. IEEE Trans Ind Inf, 2018, 14: 3044–3053
Wu G. Kinematic analysis and optimal design of a wall-mounted four-limb parallel Schonflies-motion robot for pick-and-place operations. J Intell Robot Syst, 2017, 85: 663–677
Al-Naimi I, Taeim A, Alajdah N. Fully-automated parallel-kinematic robot for multitask industrial operations. In: Proceedings of 2018 15th International Multi-Conference on Systems, Signals & Devices, 2018. 390–395
Menon A, Prakash R, Behera L. Adaptive critic based optimal kinematic control for a robot manipulator. In: Proceedings of International Conference on Robotics and Automation (ICRA), 2019. 1316–1322
Corke P I. A robotics toolbox for MATLAB. IEEE Robot Automat Mag, 1996, 3: 24–32
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Khan, A.H., Li, S. & Cao, X. Tracking control of redundant manipulator under active remote center-of-motion constraints: an RNN-based metaheuristic approach. Sci. China Inf. Sci. 64, 132203 (2021). https://doi.org/10.1007/s11432-019-2735-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11432-019-2735-6