
Abstract
Purpose
Electromagnetic (EM)-guided endoscopy has demonstrated its value in minimally invasive interventions. Accuracy evaluation of the system is of paramount importance to clinical applications. Previously, a number of researchers have reported the results of calibrating the EM-guided endoscope; however, the accumulated errors of an integrated system, which ultimately reflect intra-operative performance, have not been characterized. To fill this vacancy, we propose a novel system to perform this evaluation and use a 3D metric to reflect the intra-operative procedural accuracy.
Methods
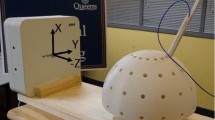
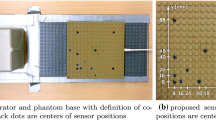
This paper first presents a portable design and a method for calibration of an electromagnetic (EM)-tracked endoscopy system. An evaluation scheme is then described that uses the calibration results and EM-CT registration to enable real-time data fusion between CT and endoscopic video images. We present quantitative evaluation results for estimating the accuracy of this system using eight internal fiducials as the targets on an anatomical phantom: the error is obtained by comparing the positions of these targets in the CT space, EM space and endoscopy image space. To obtain 3D error estimation, the 3D locations of the targets in the endoscopy image space are reconstructed from stereo views of the EM-tracked monocular endoscope. Thus, the accumulated errors are evaluated in a controlled environment, where the ground truth information is present and systematic performance (including the calibration error) can be assessed.
Results
We obtain the mean in-plane error to be on the order of 2 pixels. To evaluate the data integration performance for virtual navigation, target video-CT registration error (TRE) is measured as the 3D Euclidean distance between the 3D-reconstructed targets of endoscopy video images and the targets identified in CT. The 3D error (TRE) encapsulates EM-CT registration error, EM-tracking error, fiducial localization error, and optical-EM calibration error.
Conclusion
We present in this paper our calibration method and a virtual navigation evaluation system for quantifying the overall errors of the intra-operative data integration. We believe this phantom not only offers us good insights to understand the systematic errors encountered in all phases of an EM-tracked endoscopy procedure but also can provide quality control of laboratory experiments for endoscopic procedures before the experiments are transferred from the laboratory to human subjects.
Similar content being viewed by others

References
Krucker J, Xu S, Glossop N et al (2007) Electromagnetic tracking for thermal ablation and biopsy guidance: clinical evaluation of spatial accuracy. J Vasc Interv Radiol 18: 1141–1150
Zhang H, Banovac F, Lin R et al (2006) Electromagnetic tracking for abdominal interventions in computer aided surgery. Comput Aided Surg 11: 127–136
Wood BJ, Zhang H, Durrani A et al (2005) Navigation with electromagnetic tracking for interventional radiology procedures: a feasibility study. J Vasc Interv Radiol 16: 493–505
Birkfellner W, Hummel J, Wilson E, Cleary K (2008) Tracking devices. In: Image-guided interventions. Springer, pp 26–29
Hautmann H, Schneider A, Pinkau T, Peltz F, Feussner H (2005) Electromagnetic catheter navigation during bronchoscopy: validation of a novel method by conventional fluoroscopy. Chest 128: 382–387
Solomon SB, White P Jr, Wiener CM, Orens JB, Wang KP (2000) Three-dimensional CT-guided bronchoscopy with a real-time electromagnetic position sensor: a comparison of two image registration methods. Chest 118: 1783–1787
Solomon SB, White P Jr, Acker DE, Strandberg J, Venbrux AC (1998) Real-time bronchoscope tip localization enables three-dimensional CT image guidance for transbronchial needle aspiration in swine. Chest 114: 1405–1410
Superdimension (2003) http://www.Superdimension.com
Konen W, Scholz M, Tombrock S (1997) An image-based navigation support system for neuroendoscopic surgery. In: Ahlers R (ed) Symposium Bildeverarbei\({\lnot}\) tung, Technische Akade
Konen W, Scholz M, Tombrock S (1998) The VN-project: endoscopic image processing for neurosurgery. Comput Aided Surg 3: 144–148
Feuerstein M, Wildhirt SM, Bauernschmitt R, Navab N (2005) Automatic patient registration for port placement in minimally invasive endoscopic surgery. In: International conference on medical image computing and computer-assisted intervention (MICCAI), pp 287–294
Liewald F, Lang G, Fleiter T, Sokiranski R, Halter G, Orend KH (1998) Comparison of virtual and fiberoptic bronchoscopy. Thorac Cardiovasc Surg 46: 361–364
Lacasse Y, Martel S, Hebert A, Carrier G, Raby B (2004) Accuracy of virtual bronchoscopy to detect endobronchial lesions. Ann Thorac Surg 77: 1774–1780
De Wever W, Bogaert J, Verschakelen JA (2005) Virtual bronchoscopy: accuracy and usefulness—an overview. Semin Ultrasound CT MR 26: 364–373
Zhang Z (2004) Camera calibration with one-dimensional objects. IEEE Trans Pattern Anal Mach Intell 26: 892–899
Tsai R (1987) A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J Robot Autom [legacy, pre-1988] 3: 323–344
Basu A, Ravi K (1997) Active camera calibration using pan, tilt and roll. IEEE Trans Syst Man Cybern B Cybern 27: 559–566
Kannala J, Brandt SS (2006) A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses. IEEE Trans Pattern Anal Mach Intell 28: 1335–1340
Martins HA, Birk JR, Kelley RB (1981) Camera models based on data from two calibration planes. Comput Graph Image Process 17: 173–180
Brown D (1971) Close-range camera calibration. Photogramm Eng 37: 855–866
Gennery DB (1979) Stereo-camera calibration. In: Proceedings of image understanding workshop, pp 101–108
Willson R (1995) Tsai Camera Calibration Software. http://www.cs.cmu.edu/afs/cs/usr/rgw/www/TsaiCode.html
He XC, Yung NHC (2004) Curvature scale space corner detector with adaptive threshold and dynamic region of support. In: Proceedings of the 17th international conference on pattern recognition, pp 791–794
Aurora. Aurora Technical Specifications. http://www.ndigital.com/medical/aurora-techspecs-performance.php
Horn BKP (1987) Closed-form solution of absolute orientation using unit quaternions. J Opt Soc Am 4: 629–642
Horn BKP (1986) Robot vision. MIT Press, Cambridge
Bouguet J-Y (2006) Camera calibration toolbox for matlab. http://www.vision.caltech.edu/bouguetj/calib_doc/index.html
Shahidi R, Bax MR, Maurer CR Jr et al (2002) Implementation, calibration and accuracy testing of an image-enhanced endoscopy system. IEEE Trans Med Imaging 21: 1524–1535
Zhang H, Wong KY, Zhang G (2007) Camera calibration from images of spheres. IEEE Trans Pattern Anal Mach Intell 29: 499–503
Cao X, Foroosh H (2006) Camera calibration using symmetric objects. IEEE Trans Image Process 15: 3614–3619
Deligianni F, Chung A, Yang G-Z (2006) Non-rigid 2D-3D registration with Catheter Tip EM tracking for patient specific bronchoscope simulation. In: Medical image computing and computer-assisted intervention—MICCAI 2006, pp 281–290
Mori K, Deguchi D, Kitasaka T et al (2008) Improvement of accuracy of marker-free bronchoscope tracking using electromagnetic tracker based on bronchial branch information. In: MICCAI 2008, pp 535–542
Helferty JP, Sherbondy AJ, Kiraly AP, Higgins WE (2007) Computer-based system for the virtual-endoscopic guidance of bronchoscopy. Comput Vis Image Underst 108: 171
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Liu, S.X., Gutiérrez, L.F. & Stanton, D. Quantitative evaluation for accumulative calibration error and video-CT registration errors in electromagnetic-tracked endoscopy. Int J CARS 6, 407–419 (2011). https://doi.org/10.1007/s11548-010-0518-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-010-0518-4