
Abstract
Purpose
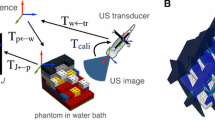
Ultrasound-guided 3D interventions require calibration to relate real-time 2D images with the position and orientation of the ultrasound probe. Capturing several images of a single fixed point from different viewpoints is a simple and commonly used approach, but it is cumbersome and tedious. A new phantom for calibration was designed, built and tested to simplify this process.
Methods
A mechanical phantom that restricts the motion of the ultrasound probe was designed such that the ultrasound image always captures a designated fixed point. Software was implemented which computes calibration parameters. Although the software provides no scientific novelty, it is required to demonstrate the proof of concept and to assess the accuracy and precision of the calibration phantom. The software also illustrates how the phantom enables the fixed point to be located automatically, both in tracker device coordinates and in image pixel coordinates.
Results
The phantom was used to capture several hundred images of a single fixed point in less than 1 min, with different probe positions and orientations around the fixed point and with the single fixed point located in different parts of the ultrasound image. It would not be feasible to capture the same number of images by manual alignment of the probe with the fixed point.
Conclusion
Images for single fixed point calibration can be captured easily and quickly with a new calibration phantom. Since a larger number of images can be used to compute the required parameters, the calibration robustness is increased.
Similar content being viewed by others


References
Atkinson D, Burcher M, Declerck J, Noble JA (2001) Respiratory motion compensation for 3-d freehand echocardiography. Ultrasound Med Biol 27(12): 1615–1620. doi:10.1016/S0301-5629(01)00483-5
Barratt DC, Penney GP, Chan CSK, Slomszykowski M, Carter TJ, Edwards PJ, Hawkes DJ (2006) Self-calibrating 3d-ultrasound-based bone registration for minimally invasive orthopedic surgery. IEEE Trans Med Imaging 25(3): 312–323
Blackall JM, Rueckert D, Maurer CR Jr, Penney GP, Hill DLG, Hawkes DJ (2000) An image registration approach to automated calibration for freehand 3d ultrasound. In: MICCAI ’00: proceedings of the third international conference on medical image computing and computer-assisted intervention. Springer, London, pp 462–471
Boctor EM, Fichtinger G, Taylor RH, Choti MA (2003) Tracked 3D ultrasound in radio-frequency liver ablation. In: Walker WF, Insana MF (eds) Society of photo-optical instrumentation engineers (SPIE) conference series, society of photo-optical instrumentation engineers (SPIE) conference series, vol 5035. pp 174–182. doi:10.1117/12.479952
Brendel B, Winter S, Ermert H (2004) A simple and accurate calibration method for 3d freehand ultrasound. Biomed Tech 49: 872–873
Canny J (1986) A computational approach to edge detection. IEEE Trans Pattern Anal Mach Intell 8(6): 679–698. doi:10.1109/TPAMI.1986.4767851
Detmer PR, Bashein G, Hodges T, Beach KW, Filer EP, Burns DH, Strandness DE Jr (1994) 3d ultrasonic image feature localization based on magnetic scanhead tracking: in vitro calibration and validation. Ultrasound Med Biol 20(9): 923–936
Duda RO, Hart PE (1972) Use of the hough transformation to detect lines and curves in pictures. Commun ACM 15(1): 11–15
Galassi M, Davies J, Theiler J, Gough B, Jungman G, Booth M, Rossi F (2005) GNU scientific library reference manual, revised 2nd edn, chap 37. Network Theory Limited, UK, pp, pp 487–500
Gee AH, Houghton NE, Treece GM, Prager RW (2005) A mechanical instrument for 3d ultrasound probe calibration. Ultrasound Med Biol 31(4): 505–518
Goldstein A (2000) The effect of acoustic velocity on phantom measurements. Ultrasound Med Biol 26: 1133–1143
Gooding MJ, Kennedy SH, Noble JA (2005) Temporal calibration of freehand three-dimensional ultrasound using image alignment. Ultrasound Med Biol 31(7): 919–927. doi:10.1016/j.ultrasmedbio.2005.04.007
Hsu PW (2007) Freehand three-dimensional ultrasound calibration. PhD thesis, University of Cambridge
Hsu PW, Prager RW, Gee AH, Treece GM (2008) Real-time freehand 3d ultrasound calibration. Ultrasound Med Biol 34: 239–251
Mercier L, Langø T, Lindseth F, Collins DL (2005) A review of calibration techniques for freehand 3-d ultrasound systems. Ultrasound Med Biol 31(4): 449–471
Milko S, Melvær EL, Samset E, Kadir T (2009) Evaluation of bivariate correlation ratio similarity metric for rigid registration of us/mr images of the liver. Int J Comput Assist Radiol Surg 4(2): 147–155
Moré JJ (1978) Numerical analysis, lecture notes in mathematics, vol 630, chap. The Levenberg-Marquardt algorithm: implementation and theory. Springer, Berlin, pp 105–116
Prager RW, Rohling RN, Gee AH, Berman L (1998) Rapid calibration for 3-d freehand ultrasound. Ultrasound Med Biol 24(6): 855–869. doi:10.1016/S0301-5629(98)00044-1
Solberg OV, Lindseth F, Torp H, Blake RE, Hernes TAN (2007) Freehand 3d ultrasound reconstruction algorithms—a review. Ultrasound Med Biol 33(7): 991–1009
Tehnical specifications of the Aurora tracking system. http://www.ndigital.com/medical/aurora-techspecs-performance.php
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Melvær, E.L., Mørken, K. & Samset, E. A motion constrained cross-wire phantom for tracked 2D ultrasound calibration. Int J CARS 7, 611–620 (2012). https://doi.org/10.1007/s11548-011-0661-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-011-0661-6