
Abstract
Purpose
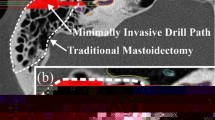
Minimally invasive cochlear implantation is a surgical technique which requires drilling a canal from the mastoid surface toward the basal turn of the cochlea. The choice of an appropriate drilling strategy is hypothesized to have significant influence on the achievable targeting accuracy. Therefore, a method is presented to analyze the contribution of the drilling process and drilling tool to the targeting error isolated from other error sources.
Methods
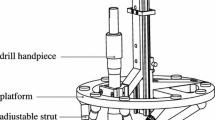
The experimental setup to evaluate the borehole accuracy comprises a drill handpiece attached to a linear slide as well as a highly accurate coordinate measuring machine (CMM). Based on the specific requirements of the minimally invasive cochlear access, three drilling strategies, mainly characterized by different drill tools, are derived. The strategies are evaluated by drilling into synthetic temporal bone substitutes containing air-filled cavities to simulate mastoid cells. Deviations from the desired drill trajectories are determined based on measurements using the CMM.
Results
Using the experimental setup, a total of 144 holes were drilled for accuracy evaluation. Errors resulting from the drilling process depend on the specific geometry of the tool as well as the angle at which the drill contacts the bone surface. Furthermore, there is a risk of the drill bit deflecting due to synthetic mastoid cells.
Conclusions
A single-flute gun drill combined with a pilot drill of the same diameter provided the best results for simulated minimally invasive cochlear implantation, based on an experimental method that may be used for testing further drilling process improvements.






Similar content being viewed by others

References
Balachandran R, Mitchell JE, Blachon G, Noble JH, Dawant BM, Fitzpatrick JM, Labadie RF (2010) Percutaneous cochlear implant drilling via customized frames: an in vitro study. Otolaryngol Head Neck Surg 142(3):421–426. doi:10.1016/j.otohns.2009.11.029
Balachandran R, Mitchell JE, Noble J, Schurzig D, Blachon G, McRackan TR, Webster RJ, Dawant BM, Fitzpatrick JM, Labadie RF (2011) Insertion of electrode array using percutaneous cochlear implantation technique: a cadaveric study. In: Wong KH, Holmes DR III (eds.) Medical Imaging 2011: visualization, image-guided procedures, and modeling. SPIE—International Society for Optical Engineering, pp 79641E–79641E–7. doi:10.1117/12.878786
Baron S, Eilers H, Munske B, Toennies JL, Balachandran R, Labadie RF, Ortmaier T, Webster RJ (2010) Percutaneous inner-ear access via an image-guided industrial robot system. Proc Inst Mech Eng Part H J Eng Med 224(5):633–649. doi:10.1243/09544119JEIM781
Bell B, Gerber N, Williamson T, Gavaghan K, Wimmer W, Caversaccio M, Weber S (2013) In vitro accuracy evaluation of image-guided robot system for direct cochlear access. Otol Neurotol 34(7):1284–1290. doi:10.1097/MAO.0b013e31829561b6
Bell B, Stieger C, Gerber N, Arnold A, Nauer C, Hamacher V, Kompis M, Nolte L, Caversaccio M, Weber S (2012) A self-developed and constructed robot for minimally invasive cochlear implantation. Acta Oto-laryngologica 132(4):355–360. doi:10.3109/00016489.2011.642813
Eilers H, Baron S, Ortmaier T, Heimann B, Baier C, Rau TS, Leinung M, Majdani O (2009) Navigated, robot assisted drilling of a minimally invasive cochlear access. In: Proceedings of the 2009 IEEE international conference on mechatronics. IEEE, Málaga, Spain. doi:10.1109/ICMECH.2009.4957213
Kobler JP, Beckmann D, Rau T, Majdani O, Ortmaier T (2013) An automated insertion tool for cochlear implants with integrated force sensing capability. Int J Comput Assist Radiol Surg. doi:10.1007/s11548-013-0936-1
Kobler JP, Kotlarski J, Öltjen J, Baron S, Ortmaier T (2012) Design and analysis of a head-mounted parallel kinematic device for skull surgery. Int J CARS 7(1):137–149. doi:10.1007/s11548-011-0619-8
Kratchman LB, Blachon GS, Withrow TJ, Balachandran R, Labadie RF, Webster RJ (2011) Design of a bone-attached parallel robot for percutaneous cochlear implantation. IEEE Trans Biomed Eng 58(10):2904–2910. doi:10.1109/TBME.2011.2162512
Kratchman LB, Fitzpatrick JM (2013) Robotically-adjustable microstereotactic frames for image-guided neurosurgery. Proc SPIE 8671:86711U–86711U–11. doi:10.1117/12.2008172
Labadie RF, Balachandran R, Mitchell J, Noble JH, Majdani O, Haynes D, Bennett M, Dawant BM, Fitzpatrick JM (2010) Clinical validation study of percutaneous cochlear access using patient-customized microstereotactic frames. Otol Neurotol 31(1):94. doi:10.1097/MAO.0b013e3181c2f81a
Labadie RF, Balachandran R, Noble JH, Blachon GS, Mitchell JE, Reda FA, Dawant BM, Fitzpatrick JM (2013) Minimally-invasive, image-guided cochlear implantation surgery: first report of clinical implementation. Laryngoscope. doi:10.1002/lary.24520
Labadie RF, Choudhury P, Cetinkaya E, Balachandran R, Haynes DS, Fenlon M, Juscyzk S, Fitzpatrick JM (2005) Minimally-invasive, image-guided, facial-recess approach to the middle ear: demonstration of the concept of percutaneous cochlear access in vitro. Otol Neurotol 26:557–562
Majdani O, Rau T, Baron S, Eilers H, Baier C, Heimann B, Ortmaier T, Bartling S, Lenarz T, Leinung M (2009) A robot-guided minimally invasive approach for cochlear implant surgery: preliminary results of a temporal bone study. Int J CARS 4:475–486. doi:10.1007/s11548-009-0360-8
McRackan T, Balachandran R, Blachon G, Mitchell J, Noble J, Wright C, Fitzpatrick J, Dawant B, Labadie R (2013) Validation of minimally invasive, image-guided cochlear implantation using advanced bionics, cochlear, and medel electrodes in a cadaver model. Int J Comput Assist Radiol Surg 8(6):989–995. doi:10.1007/s11548-013-0842-6
Rau TS, Kluge M, Prielozny L, Kobler JP, Lenarz T, Majdani O (2013) Auf dem Weg zur klinischen Anwendung: Eine Weiterentwicklung des automatisierten Insertionstools für Cochlea-Implantate. In: Freysinger, W (ed) Tagungsband der 12. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie e.V. (CURAC), pp 41–45
Rau TS, Lenarz T, Majdani O (2013) Insertionstool bei minimal-invasivem Zugang zur Cochlea: eine Bauraumanalyse. In: Tagungsband zur 84. Jahresversammlung der Dt. Gesellschaft für Hals-Nasen-Ohren-Heilkunde, Kopf- und Hals-Chirurgie e.V., p 48. doi:10.3205/13hnod106
Schipper J, Aschendorff A, Arapakis I, Klenzner T, Teszler CB, Ridder GJ, Laszig R (2004) Navigation as a quality management tool in cochlear implant surgery. J Laryngol Otol 118:764–770. doi:10.1258/0022215042450643
Schweighoefer G (2006) Method for making a deep hole and a pilot drill therefor International Patent WO2007118718 A1
Smith GT (2008) Cutting tool technology. Springer, London. doi:10.1007/978-1-84800-205-0
Stieger C, Caversaccio M, Arnold A, Zheng G, Salzmann J, Widmer D, Gerber N, Thurner M, Nauer C, Mussard Y et al (2011) Development of an auditory implant manipulator for minimally invasive surgical insertion of implantable hearing devices. J Laryngol Otol 125(03):262–270. doi:10.1017/S0022215110002185
Warren FM, Balachandran R, Fitzpatrick JM, Labadie RF (2007) Percutaneous cochlear access using bone-mounted, customized drill guides: demonstration of concept in vitro. Otol Neurotol 28(3):325–329. doi:10.1097/01.mao.0000253287.86737.2e
Acknowledgments
The authors would like to thank Robert F. Labadie, MD, Ph.D. and Ramya Balachandran, Ph.D. (Vanderbilt University Medical Center, Nashville, TN, USA) for gratefully providing comprehensive information on the drill bits used in their studies. The co-author Thomas S. Rau would like to thank Prof. Witte (Ilmenau University of Technology, Ilmenau, Germany) for the motivating and guiding discussion about industrial deep-hole drilling and its transfer to clinical application. This work was funded by the German Research Foundation (DFG). The project numbers are OR 196/10-1 and MA 4038/6-1. Responsibility for the contents of this publication lies with the authors.
Conflict of interest
Jan-Philipp Kobler, Michael Schoppe, G. Jakob Lexow, Thomas S. Rau, Omid Majdani, Lüder A. Kahrs and Tobias Ortmaier declare that they have no conflict of interest.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kobler, JP., Schoppe, M., Lexow, G.J. et al. Temporal bone borehole accuracy for cochlear implantation influenced by drilling strategy: an in vitro study. Int J CARS 9, 1033–1043 (2014). https://doi.org/10.1007/s11548-014-0997-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-014-0997-9