
Abstract
Purpose
In the dental implant surgery, there are inevitable risks due to the anatomically complex operation in the cranio-maxillofacial region. Therefore, there is a trend to use computer-aided technology to simulate the process of the implant surgery. In this study, we present a haptic simulator for trainees to study and rehearse the drilling performance of dental implant surgery.
Materials and methods
The dental implant surgery simulator (DISS) is developed based on the haptic force-feedback device Omega.6, and some free open-source software libraries such as Computer Haptics and Active Interface (CHAI3D), Qt and Visualization Toolkit. To achieve the desired effects of drilling, the meshes are subdivided with a recursive algorithm which breaks down a triangular patch into 4 sub-triangles. The drilling operation can be implemented at any specified location of the model. Once the drilling direction is determined, the position and rotation of the haptic device tool are constrained to the orientation through a dimension reduction algorithm. The driller diameter and drill speed are tunable to implement stepwise drilling for the patient-specific models.
Results
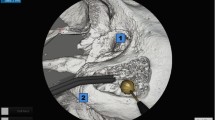
A patient-specific drilling simulator based on virtual reality for dental implant surgery is presented. The simulation of stepwise drilling was conducted, and three patient-specific models reconstructed by Computed Tomography data were employed to help the novices to find the suitable drilling parameter.
Conclusion
The obtained results showed that the haptic-based DISS could simulate various dental implant surgeries with different driller diameter and drill speed which takes patient-specific models as input. The evaluation of the DISS proves its good performance and it could provide an effective method to improve the skills and experiences of trainees.












Similar content being viewed by others


References
Kusumoto N, Sohmura T, Yamada S, Wakabayashi K, Nakamura T, Yatani H (2006) Application of virtual reality force feedback haptic device for oral implant surgery. Clin Oral Implant Res 17:708–713
Chen X, Lin Y, Wang C, Wu Y, Wang X, Shen G (2010) An integrated surgical planning and virtual training system using a force feedback haptic device for dental implant surgery. In: 2010 international conference on audio, language and image processing (ICALIP), pp 1257–1261
Verstreken K, Van Cleynenbreugel J, Martens K, Marchal G, van Steenberghe D, Suetens P (1998) An image-guided planning system for endosseous oral implants. IEEE Trans Med Imaging 17:842–852
Zheng GC, Gu LX, Li XB, Zhang JS (2007) Computer-assisted preoperative planning and surgical navigation system in dental implantology. In: 2007 6th international special topic conference on information technology applications in biomedicine, pp 73–76
Sohmura T, Hojo H, Nakajima M, Wakabayashi K, Magao M, Iida S, Kitagawa T, Kogo M, Kojima T, Matsumura K, Nakamura T, Takahashi J (2004) Prototype of simulation of orthognathic surgery using a virtual reality haptic device. Int J Oral Maxillofac Surg 33(8):740–750
Wu F, Chen X, Lin Y, Wang C, Wang X, Shen G, Qin J, Heng PA (2014) A virtual training system for maxillofacial surgery using advanced haptic feedback and immersive workbench. Int J Med Robot + Comput Assist Surg MRCAS 10:78–87
Chiarelli T, Franchini F, Lamma A, Lamma E, Sansoni T (2012) From implant planning to surgical execution: an integrated approach for surgery in oral implantology. Int J Med Robot Comput 8:57–66
Schendel S, Montgomery K, Sorokin A, Lionetti G (2005) A surgical simulator for planning and performing repair of cleft lips. J Cranio Maxillofac Surg 33:223–228
O’Toole RV, Playter RR, Krummel TM, Blank WC, Cornelius NH, Roberts WR, Bell WJ, Raibert M (1999) Measuring and developing suturing technique with a virtual reality surgical simulator. J Am Coll Surg 189:114–127
Zheng F, Feng LuW, San Wong Y, Foong KWC (2013) Graphic processing units (GPUs)-based haptic simulator for dental implant surgery. J Comput Inf Sci Eng 13:041005
Tsai MD, Hsieh MS, Tsai CH (2007) Bone drilling haptic interaction for orthopedic surgical simulator. Comput Biol Med 37:1709–1718
Lin YP, Wang XD, Wu FL, Chen XJ, Wang CT, Shen GF (2014) Development and validation of a surgical training simulator with haptic feedback for learning bone-sawing skill. J Biomed Inform 48:122–129
Hayward V, Gregorio P, Astley O, Greenish S, Doyon M, Lessard L, McDougall J, Sinclair I, Boelen S, Chen X, Demers J-G, Poulin J, Benguigui I, Almey N, Makuc B, Zhang X (1998) Freedom-7: a high fidelity seven axis haptic device with application to surgical training. Lecture notes in control and information science, pp 445–456
Ruffaldi E, Morris D, Barbagli F, Salisbury K, Bergamasco M (2008) Voxel-based haptic rendering using implicit sphere trees. IEEE Computer Society, Los Alamitos
Wanschitz F, Birkfellner W, Figl M, Patruta S, Wagner A, Watzinger F, Yerit K, Schicho K, Hanel R, Kainberger F, Imhof H, Bergmann H, Ewers R (2002) Computer-enhanced stereoscopic vision in a head-mounted display for oral implant surgery. Clin Oral Implant Res 13:610–616
Zilles CB, Salisbury JK (1995) A constraint-based god-object method for haptic display. In: Proceedings 1995 IEEE/RSJ international conference on intelligent robots and systems human robot interaction and cooperative robots (Cat No95CB35836), vol 3. pp 146–151
Wang DX, Zhang Y, Wang Y, Lu P, Wang Y (2003) Development of dental training system with haptic display. In: Ro-Man 2003: 12th IEEE international workshop on robot and human interactive communication, proceedings, pp 159–164
Gregory A, Lin MC, Gottschalk S, Taylor R (2000) Fast and accurate collision detection for haptic interaction using a three degree-of-freedom force-feedback device. Comput Geom Theor Appl 15:69–89
Chang CT, Gorissen B, Melchior S (2011) Fast oriented bounding box optimization on the rotation group SO(3, R). Acm Trans Graph 30(5):1–16
Sießegger M, Schneider BT, Mischkowski RA, Lazar F, Krug B, Klesper B, Zöller JE (2001) Use of an image-guided navigation system in dental implant surgery in anatomically complex operation sites. J Cranio Maxillo-fac Surg 29:276–281
Lin YP, Yu DD, Chen XJ, Wang XD, Shen GF, Wang CT (2014) Simulation and evaluation of a bone sawing procedure for orthognathic surgery based on an experimental force model. J Biomech Eng-T ASME 136:034501
Kovler I, Joskowicz L, Weil YA, Khoury A, Kronman A, Mosheiff R, Liebergall M, Salavarrieta J (2015) Haptic computer-assisted patient-specific preoperative planning for orthopedic fractures surgery. Int J Comput Assist Radiol Surg 10:1535–1546
Pettersson J, Palmerius KL, Knutsson H, Wahlstrom O, Tillander B, Borga M (2008) Simulation of patient specific cervical hip fracture surgery with a volume haptic interface. IEEE Trans Biomed Eng 55:1255–1265
Ming-Shium H, Ming-Dar T, Yi-Der Y (2006) An amputation simulator with bone sawing haptic interaction. Biomed Eng Appl Basis Commun 18:229–236
Wang Q, Chen H, Wu W, Jin HY, Heng PA (2012) A virtual surgical simulator for mandibular angle reduction based on patient specific data. In: IEEE virtual reality conference 2012 proceedings, pp 85–86
Acknowledgements
This study was supported by the National Key Research and Development Program of China (2017YFB1302903; 2017YFB1104100), Foundation of Science and Technology Commission of Shanghai Municipality (15510722200; 16441908400; 18511108200), and Shanghai Jiao Tong University Foundation on Medical and Technological Joint Science Research (YG2016ZD01; YG2015MS26).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki declaration and its later amendments or comparable ethical standards.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Rights and permissions
About this article

Cite this article
Chen, X., Sun, P. & Liao, D. A patient-specific haptic drilling simulator based on virtual reality for dental implant surgery. Int J CARS 13, 1861–1870 (2018). https://doi.org/10.1007/s11548-018-1845-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-018-1845-0