
Abstract
Purpose
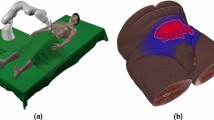
Robotic ultrasound promises continuous, volumetric, and non-ionizing tracking of organ motion during radiation therapy. However, placement of the robot is critical because it is radio-opaque and might severely influence the achievable dose distribution.
Methods
We propose two heuristic optimization strategies for automatic placement of an ultrasound robot around a patient. Considering a kinematically redundant robot arm, we compare a generic approach based on stochastic search and a more problem-specific segmentwise construction approach. The former allows for multiple elbow configurations while the latter is deterministic. Additionally, we study different objective functions guiding the search. Our evaluation is based on data for ten actual prostate cancer cases and we compare the resulting plan quality for both methods to manually chosen robot configurations previously proposed.
Results
The mean improvements in the treatment planning objective value with respect to the best manually selected robot position and a single elbow configuration range from 8.2 to 32.8% and 8.5 to 15.5% for segmentwise construction and stochastic search, respectively. Considering three different elbow configurations, the stochastic search results in better objective values in 80% of the cases, with 30% being significantly better. The optimization strategies are robust with respect to beam sampling and transducer orientation and using previous optimization results as starting point for stochastic search typically results in better solutions compared to random starting points.
Conclusion
We propose a robust and generic optimization scheme, which can be used to optimize the robot placement for robotic ultrasound guidance in radiation therapy. The automatic optimization further mitigates the impact of robotic ultrasound on the treatment plan quality.







Similar content being viewed by others

References
Tong X, Chen X, Li J, Xu Q, Lin M, Chen L, Price RA, Ma CM (2015) Intrafractional prostate motion during external beam radiotherapy monitored by a real-time target localization system. J Appl Clin Med Phys 16(2):51–61
Colvill E, Booth J, Nill S, Fast M, Bedford J, Oelfke U, Nakamura M, Poulsen P, Worm E, Hansen R, Ravkilde T, Rydhög JS, Pommer T, af Rosenschold PM, Lang S, Guckenberger M, Groh C, Herrmann C, Verellen D, Poels K, Wang L, Hadsell M, Sothmann T, Blanck O, Keall P (2016) A dosimetric comparison of real-time adaptive and non-adaptive radiotherapy: a multi-institutional study encompassing robotic, gimbaled, multileaf collimator and couch tracking. Radiother Oncol 119(1):159–165
Krauss A, Fast MF, Nill S, Oelfke U (2012) Multileaf collimator tracking integrated with a novel X-ray imaging system and external surrogate monitoring. Phys Med Biol 57(8):2425
Schlosser J, Hristov D (2016) Radiolucent 4D ultrasound imaging: system design and application to radiotherapy guidance. IEEE Trans Med Imaging 35:2292–2300
Camps SM, Fontanarosa D, de With PHN, Verhaegen F, Vanneste BGL (2018) The use of ultrasound imaging in the external beam radiotherapy workflow of prostate cancer patients. BioMed Res Int 2018:759
Schwaab J, Prall M, Sarti C, Kaderka R, Bert C, Kurz C, Parodi K, Guenther M, Jenne JEN (2014) Ultrasound tracking for intra-fractional motion compensation in radiation therapy. Physica Medica 30(5):578–82
Western C, Hristov D, Schlosser J (2015) Ultrasound imaging in radiation therapy: from interfractional to intrafractional guidance. Cureus 7(6):280
O’Shea T, Bamber J, Fontanarosa D, van der Meer S, Verhaegen F, Harris E (2016) Review of ultrasound image guidance in external beam radiotherapy part II: intra-fraction motion management and novel applications. Phys Med Biol 61(8):R90–R137
Ipsen S, Bruder R, O’Brien R, Keall PJ, Schweikard A, Poulsen PR (2016) Online 4D ultrasound guidance for real-time motion compensation by MLC tracking. Med Phys 43(10):5695–5704
Zhong Y, Stephans K, Qi P, Yu N, Wong J, Xia P (2013) Assessing feasibility of real-time ultrasound monitoring in stereotactic body radiotherapy of liver tumors. Technol Cancer Res Treat 12(3):243–250
De Luca V, Benz T, Kondo S, König L, Lübke D, Rothlübbers S, Somphone O, Allaire S, Lediju Bell MA, Chung DYF, Cifor A, Grozea C, Günther M, Jenne J, Kipshagen T, Kowarschik M, Navab N, Rühaak J, Schwaab J, Tanner C (2015) The 2014 liver ultrasound tracking benchmark. Phys Med Biol 60(14):5571–5599
De Luca V, Banerjee J, Hallack A, Kondo S, Makhinya M, Nouri D, Royer L, Cifor A, Dardenne G, Goksel O, Gooding MJ, Klink C, Krupa A, Le Bras A, Marchal M, Moelker A, Niessen WJ, Papiez BW, Rothberg A, Schnabel J, van Walsum T, Harris E, Bell MAL, Tanner C (2018) Evaluation of 2D and 3D ultrasound tracking algorithms and impact on ultrasound-guided liver radiotherapy margins. Med Phys 45(11):4986–5003
Bell MAL, Sen HT, Iordachita II, Kazanzides P, Wong J (2014) In vivo reproducibility of robotic probe placement for a novel ultrasound-guided radiation therapy system. J Med Imaging 1(2):025001
Schlosser J, Gong RH, Bruder R, Schweikard A, Jang S, Henrie J, Kamaya A, Koong AC, Chang DT, Hristov D (2016) Robotic intrafractional US guidance for liver SABR: system design, beam avoidance, and clinical imaging. Med Phys 43(11):5951–5963
Gerlach S, Kuhlemann I, Jauer P, Bruder R, Ernst F, Fürweger C, Schlaefer A (2017) Robotic ultrasound-guided SBRT of the prostate: feasibility with respect to plan quality. Int J Comput Assist Radiol Surg 12(1):149–159
Şen HT, Bell MAL, Zhang Y, Ding K, Boctor E, Wong J, Iordachita I, Kazanzides P (2017) System integration and in vivo testing of a robot for ultrasound guidance and monitoring during radiotherapy. IEEE Trans Biomed Eng 64(7):1608–1618
Gerlach S, Kuhlemann I, Ernst F, Fürweger C, Schlaefer A (2017) Impact of robotic ultrasound image guidance on plan quality in SBRT of the prostate. Br J Radiol 90(1078):20160926
Kuhlemann I, Schweikard A, Jauer P, Ernst F (2016) Robust inverse kinematics by configuration control for redundant manipulators with seven DoF. In: IEEE international conference on control, automation and robotics, pp 49–55
Echner GG, Kilby W, Lee M, Earnst E, Sayeh S, Schlaefer A, Rhein B, Dooley JR, Lang C, Blanck O, Lessard E, Maurer CR Jr, Schlegel W (2009) The design, physical properties and clinical utility of an iris collimator for robotic radiosurgery. Phys Med Biol 54(18):5359
Acknowledgements
This work was partially funded by Deutsche Forschungsgemeinschaft (Grant SCHL 1844/3-1).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
This article is based on fully anonymized treatment planning data and does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
For this type of study, informed consent is not required.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Schlüter, M., Gerlach, S., Fürweger, C. et al. Analysis and optimization of the robot setup for robotic-ultrasound-guided radiation therapy. Int J CARS 14, 1379–1387 (2019). https://doi.org/10.1007/s11548-019-02009-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-019-02009-w