
Abstract
Purpose
Localization of an early stage gastric tumor is easily performed in conventional open surgery, whereas it is a difficult procedure in minimally invasive surgery (MIS). A tactile sensor could allow precise resection of the tumor in laparoscopic surgery. The safety of medical tools should be ensured in MIS. Moreover, boundary conditions such as a double-ended beam without a supporting rigid base during tissue palpation were hardly considered. Thus, we suppose that it is informative to assess the normal force and shear force for practical tumor detection considering the boundary condition.
Methods
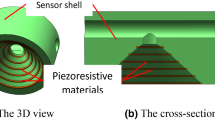
In this study, a tactile sensor with normal and shear force measurement functions using the acoustic reflection principle was developed for gastric tumor detection in MIS. The developed tactile sensor was tested using an artificial phantom of the stomach without a supporting rigid base to evaluate the force response of the sensor in intraoperative tumor localization.
Results
The developed sensor is safe for human tissue and can be sterilized. The experimental results show that the developed tactile sensor has the capability to measure normal and shear forces. In the gastric tumor detection test, the shear force of the sensor was more stable and highly responsive to the tumor position than the normal force, which is greatly affected by the bending of the tissue during the operation.
Conclusions
A two-axis tactile sensor using the acoustic reflection principle was assembled for tissue palpation in MIS. The results showed that the developed sensor is suitable for tumor detection, indicating that the shear force information of the developed sensor is more useful in MIS for early stage gastric tumor localization.












Similar content being viewed by others


References
Robinson TN, Stiegmann GV (2004) Minimally invasive surgery. Endoscopy 36(1):48–51
Lederman S, Klatzky R (1999) Sensing and displaying spatially distributed fingertip forces in haptic interfaces for teleoperator and virtual environment systems. Presence Teleoper Virtual Environ 8(1):86–103
Hoyt K, Castaneda B, Zhang M, Nigwekar P, di Sant’agnese PA, Joseph JV, Strang J, Rubens DJ, Parker KJ (2008) Tissue elasticity properties as biomarkers for prostate cancer. Cancer Biomark 4(4–5):213–225
Krouskop TA, Wheeler TM, Kallel F, Garra BS, Hall T (1998) Elastic moduli of breast and prostate tissues under compression. Ultrason Imaging 20(4):260–274
Gwilliam JC, Pezzementi Z, Jantho E, Okamura AM, Hsiao S (2010) Human vs. robotic tactile sensing: detecting lumps in soft tissue. IEEE Haptics Symposium, pp 21–28
Xie H, Liu H, Seneviratne LD, Althoefer K (2014) An optical tactile array probe head for tissue palpation during minimally invasive surgery. IEEE Sens J 14(9):3283–3291
Puangmali P, Liu H, Seneviratne LD, Dasgupta P, Althoefer K (2012) Miniature 3-axis distal force sensor for minimally invasive surgical palpation. IEEE ASME Trans Mechatron 17(4):646–656
Lv C, Wang S, Shi C (2020) A high-precision and miniature fiber bragg grating-based force sensor for tissue palpation during minimally invasive surgery. Ann Biomed Eng 48(2):669–681
Omata S, Murayama Y, Constantinou CE (2004) Real time robotic tactile sensor system for the determination of the physical properties of biomaterials. Sens Actuators A Phys 112(2–3):278–285
Kim U, Kim YB, Seok DY, So J, Choi HR (2018) A surgical palpation probe with 6-axis force/torque sensing capability for minimally invasive surgery. IEEE Trans Ind Electron 65(3):2755–2765
Ramakrishna S, Tian L, Wang C, Liao S, Teo WE (2015) Medical devices regulations, standards and practices. Elsevier Ltd, Amsterdam, pp 137–153
Fish RM, Geddes LA (2009) Conduction of electrical current to and through the human body: a review. Eplasty 9:e44
Trejos AL, Patel RV, Naish MD (2010) Force sensing and its application in minimally invasive surgery: a survey. Proc Inst Mech Eng J Mech Eng Sci 224(7):1435–1454
Tanaka Y, Fukuda T, Fujiwara M, Sano A (2015) Tactile sensor using acoustic reflection for lump detection in laparoscopic surgery. Int J Comput Assist Radiol Surg 10(2):183–193
Konstantinova J, Cotugno G, Dasgupta P, Althoefer K, Nanayakkara T (2017) Palpation force modulation strategies to identify hard regions in soft tissue organs. PLoS ONE 12(2):e0171706
Kim H, Choi S, Chung WK (2015) Feasibility of a novel indicator for lump detection using contact pressure distribution. In: Proceedings of IEEE/RSJ international conference on robots and systems, pp 2111–2117
Du WY (2014) Resistive capacitive inductive and magnetic sensor technologies. CRC Press, Boca Raton
Japanese Gastric Cancer Association (2011) Japanese classification of gastric carcinoma: 3rd English edition. Gastric Cancer 14(2):101–112
Fukuda T, Tanaka Y, Kappers AML, Fujiwara M, Sano A (2018) Visual and tactile feedback for a direct manipulating tactile sensor in laparoscopic palpation. Int J Med Robot Comput Assist Surg 14(2):e1879
Fukuda T, Tanaka Y, Kappers AML, Fujiwara M, Sano A (2018) A pneumatic tactile ring for instantaneous sensory feedback in laparoscopic tumor localization. IEEE Trans Haptics 11(4):485–497
Lazeroms M, Villavicencio G, Jongkind W, Honderd G (1996) Optical fibre force sensor for minimal invasive surgery grasping instruments. In: Proceedings of the international conference of the IEEE engineering in medicine and biology society, Amsterdam, The Netherlands, pp 234–235
McCreery GL, Trejos AL, Naish MD, Patel RV, Malthaner RA (2008) Feasibility of locating tumours in lung via kinaesthetic feedback. Int J Med Robot Comput Assist Surg 4:58–68
Akita S, Fukuda T, Tanaka Y, Kappers AML, Fujiwara M, Sano A (2018) Frequency-based temperature compensation for a tactile sensor using acoustic reflection. IEEE Robot Autom Lett 3(4):3529–3536
Funding
This work was supported in part by JSPS KAKENHI, Grant numbers JP19J23169 and JP17H01252.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflict of interest to declare.
Ethical approval
This article does not contain any studies with human participants performed by any of the authors.
Informed consent
This article does not contain patient data.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ly, H.H., Tanaka, Y. & Fujiwara, M. A tactile sensor using the acoustic reflection principle for assessing the contact force component in laparoscopic tumor localization. Int J CARS 16, 289–299 (2021). https://doi.org/10.1007/s11548-020-02294-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-020-02294-w