
Abstract
Purpose
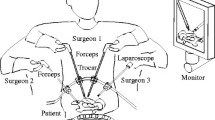
By integrating locally operated surgical assistant robots in a sterilized area, a surgeon can perform safe robotically assisted laparoscopic solo surgery while controlling a laparoscope-holding robot and a forceps robot. At present, there is no leader–follower control system with switchable connection for the leader device in which each assistant follower robot can provide the manipulation intuitively and easily. In the present study, a new locally operated leader–follower selectable control system has been developed.
Methods
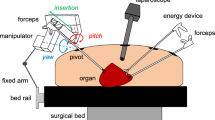
The leader–follower system was developed to connect one leader operating device and one of two selectable follower assistant manipulator devices with different numbers of axes, kinematics models, sensors, and actuators for view stabilization and pulling organs. The system is constructed using the middleware of the ORiN-based medical robot architecture MRLink. The system is regulated by the robot integrator application with unilateral leader–follower PTP using the relative displacement between the leader device and the selected follower device through providers of device interface including the information and control commands.
Results
The execution cycle for updating the position was 50 ms, and the time delay to catch up with the same position was 100 ms. Two assistant manipulators controlled by the leader–follower selectable system could successfully produce the desired view and handle the target organ model for 17 min in a simulated laparoscopic cholecystectomy.
Conclusions
A locally operated leader–follower selectable control system was constructed to facilitate minimally invasive, robotically assisted laparoscopic solo surgery by a doctor working near the patient. This system could be used for such applications.









Similar content being viewed by others

References
Taylor RH, Menciassi A, Fichtinger G, Fiorini P, Dario P (2016) Medical robotics and computer-integrated surgery. In: Siciliano B, Khatib O (eds) Springer handbook of robotics. Springer, Cham, pp 1657–1684. https://doi.org/10.1007/978-3-319-32552-1_63
Bihlmaier A (2016) Endoscope robots and automated camera guidance. In: Learning dynamic spatial relations. Springer, Wiesbaden, pp 23–71. https://doi.org/10.1007/978-3-658-14914-7
Gumbs AA, Crovari F, Vidal C, Henri P, Gayet B (2007) Modified robotic lightweight endoscope (ViKY) validation in vivo in a porcine model. Surg Innov 14(4):261–264. https://doi.org/10.1177/1553350607310281
Gillen S, Pletzer B, Heiligensetzer A, Wolf P, Kleeff J, Feussner H, Fürst A (2014) Solo-surgical laparoscopic cholecystectomy with a joystick-guided camera device: a case–control study. Surg Endosc 28(1):164–170. https://doi.org/10.1007/s00464-013-3142-x
Stolzenburg JU, Franz T, Kallidonis P, Minh D, Dietel A, Hicks J, Nicolaus M, Al-Aown A, Liatsikos E (2010) Comparison of the FreeHand robotic camera holder with human assistants during endoscopic extraperitoneal radical prostatectomy. BJU Int 107(6):970–974. https://doi.org/10.1111/j.1464-410X.2010.09656.x
Tadano K, Kawashima K (2014) A pneumatic laparoscope holder controlled by head movement. Int J Med Robot 11(3):331–340. https://doi.org/10.1002/rcs.1606
Sekimoto M, Nishikawa A, Taniguchi K, Takiguchi S, Miyazaki F, Doki Y, Mori M (2009) Development of a compact laparoscope manipulator (P-arm). Surg Endosc 23(11):2596–2604. https://doi.org/10.1007/s00464-009-0460-0
A-traction Inc. https://www.a-traction.co.jp/. Accessed 1 Sep 2020
Kawai T, Hashida J, Myongsyu S, Nishizawa Y, Nakamura T, Morita N, Murotani T, Mochizuki S (2012) Locally operated detachable end-effector manipulator for endoscopic surgery. JJSCAS 14(1):5–14. https://doi.org/10.5759/jscas.14.5
Kawai T, ShinM NY, Horise Y, Nisihkawa A, Nakamura T (2015) Mobile locally operated detachable end-effector manipulator for endoscopic surgery. Int J CARS 10(2):161–169. https://doi.org/10.1007/s11548-014-1062-4
Kawai T, Hayashi H, Nishizawa Y, Nishikawa A, Nakamura R, Kawahira H, Ito M, Nakamura T (2017) Compact forceps manipulator with a spherical-coordinate linear and circular telescopic rail mechanism for endoscopic surgery. Int J CARS 12(8):1345–1353. https://doi.org/10.1007/s11548-017-1595-4
Kawai T, Matsumoto T, Nishikawa A, Nishizawa Y, Nakamura T (2016) Bending forceps manipulator with offset distance for single-port laparoscopy. ABE 5:56–62. https://doi.org/10.14326/abe.5.56
Sasaki A, Amemori H, Kawai T, Nishikawa A, Nishizawa Y, Nakamura T (2019) Forceps manipulator with circular ring guided rail and linear guide roller for laparoscopic surgery. In: Proceedings of EMBC: FrPOS-36.31
Han S, Kawai T, Nishikawa A, Nishizawa Y, Nakamura T (2020) Portable forceps manipulator with closed loop mechanism using gimbal-mounted parallel linkage for endoscopic surgery. JJSCAS 22(1):5–13. https://doi.org/10.5759/jscas.22.5
Fukui S, Kobayashi H, Kawai T, Nishizawa Y, Nishikawa S, Iwamoto N, Horise Y, Masamune K (2018) Locally operated unilateral master–slave control system with portable device and forceps manipulator for laparoscopic surgery. Int J CARS 13(Suppl 1):S234–S236. https://doi.org/10.1007/s11548-018-1766-y
Guthart GS, Salisbury JJ (2000) The intuitive telesurgery system: overview and application. In: Proceedings of IEEE ICRA, pp 618–621. https://doi.org/10.1109/ROBOT.2000.844121
Stephan D, Sälzer H, Willeke F (2018) First experiences with the New Senhance® Telerobotic system in visceral surgery. Visc Med 34(1):31–36. https://doi.org/10.1159/000486111
Atallah S, Parra-Davila E, Melani AGF (2019) Assessment of the Versius surgical robotic system for dual-field synchronous transanal total mesorectal excision (taTME) in a preclinical model: Will tomorrow’s surgical robots promise newfound options? Tech Coloproctol 23:471–477. https://doi.org/10.1007/s10151-019-01992-1
Tadano K, Kawashima K (2010) Development of a master–slave system with force-sensing abilities using pneumatic actuators for laparoscopic surgery. AR 24(12):1763–1783
MEDICAROID Inc. http://www.medicaroid.com/en/product/hinotori/. Accessed 1 Sep 2020
Hannaford B, Rosen J, Friedman DW, King H, Roan P, Cheng L, Glozman D, Ma J, Kosari SN, White L (2013) Raven-II: an open platform for surgical robotics research. IEEE Trans Biomed Eng 60(4):954–959. https://doi.org/10.1109/TBME.2012.2228858
Kazanzides P, Chen Z, Deguet A, Fischer GS, Taylor RH, DiMaio SP (2014) An open-source research kit for the da Vinci Surgical System. In: Proceedings of IEEE ICRA, pp 6434–6439. https://doi.org/10.1109/ICRA.2014.6907809
Chen Z, Deguet A, Taylor RH, Kazanzides P (2017) Software architecture of the da Vinci Research Kit. In: Proceedings of IEEE IRC, pp 180–187. https://doi.org/10.1109/IRC.2017.69
Karino H, Fukui S, Kawai T, Nishizawa Y, Nishikawa A, Iwamoto N, Horise Y, Masamune K (2020) Master–slave selectable control system with multiple connection for locally operated surgical assistant robots in laparoscopy. Int J CARS 15(Suppl 1):S177–S179. https://doi.org/10.1007/s11548-020-02171-6
Iwamoto N, Nishikawa A, Kawai T, Horise Y, Masamune K (2018) A novel medical robot architecture with ORiN for efficient development of telesurgical robots. Int J CARS 13(Suppl 1):S40–S41. https://doi.org/10.1007/s11548-018-1766-y
ORiN http://www.orin.jp/e/. Accessed 1 Sep 2020
Perez M, Xu S, Chauhan S, Tanaka A, Simpson K, Abdul-Muhsin H, Smith R (2016) Impact of delay on telesurgical performance: study on the robotic simulator dV-Trainer. Int J CARS 11:581–587. https://doi.org/10.1007/s11548-015-1306-y
Abbou CC, Hoznek A, Salomon L, Olsson LE, Lobontiu A, Saint F, Cicco A, Antiphon P, Chopin D (2001) Laparoscopic radical prostatectomy with a remote controlled robot. J Urol 165(6 Pt 1):1964–1966. https://doi.org/10.1016/j.juro.2016.10.107
Gupta GS, Mukhopadhyay SC, Messom CH, Demidenko SN (2006) Master–slave control of a teleoperated anthropomorphic robotic arm with gripping force sensing. IEEE Trans Instrum Meas 55(6):2136–2145. https://doi.org/10.1109/TIM.2006.884393
Tewari A, Peabody J, Sarle R, Balakrishnan G, Hemal A, Shrivastava A, Menon A (2002) Technique of da Vinci robot-assisted anatomic radical prostatectomy. Urology 60(4):569–572. https://doi.org/10.1016/S0090-4295(02)01852-6
Li T, Tan F, Wang Q, Bu L, Cao JN, Liu X (2013) From offline toward real time: a hybrid systems model checking and CPS codesign approach for medical device plug-and-play collaborations. IEEE Trans Parallel Distrib Syst 25(3):642–652. https://doi.org/10.1109/TPDS.2013.50
Kasparick M, Schmitz M, Andersen B, Rockstroh M, Franke S, Schlichting S, Golatowski F, Timmermann D (2018) OR.NET: a service-oriented architecture for safe and dynamic medical device interoperability. Biomed Tech 63(1):11–30. https://doi.org/10.1515/bmt-2017-0020
Okamoto J, Horise Y, Masamune K, Iseki H, Muragaki Y (2016) Development of a prototype model of “Hyper SCOT (Smart Cyber Operating Theater).” Int J CARS 11(Suppl 1):S163–S164. https://doi.org/10.1007/s11548-016-1412-5
Meara JG, Leather AJM, Hagander L, Alkire BC, Alonso N, Ameh EA, Bickler SW, Conteh L, Dare AJ, Davies J, Mérisier ED, El-Halabi S, Farmer PE, Gawande A, Gillies R, Greenberg SLM, Grimes CE, Gruen RL, Ismail EA, Kamara TB, Lavy C, Lundeg G, Mkandawire NC, Raykar NP, Riesel JN, Rodas E, Rose J, Roy N, Shrime MG, Sullivan R, Verguet S, Watters D, Weiser TG, Wilson IH, Yamey G, Yip W (2015) Global Surgery 2030: evidence and solutions for achieving health, welfare, and economic development. Lancet 386(9993):569–624. https://doi.org/10.1016/S0140-6736(15)60160-X
Holmer H, Lantz A, Kunjumen T, Finlayson S, Hoyler M, Siyam A, Montenegro H, Kelley ET, Campbell J, Cherian MN, Hagander L (2015) Global distribution of surgeons, anaesthesiologists, and obstetricians. Lancet Glob Health 3(Suppl 2):S9-11. https://doi.org/10.1016/S2214-109X(14)70349-3
Holmer H, Shrime MG, Riesel JN, Meara JG, Hagander L (2015) Towards closing the gap of the global surgeon, anaesthesiologist, and obstetrician workforce: thresholds and projections towards 2030. Lancet 385(Suppl 2):S40. https://doi.org/10.1016/S0140-6736(15)60835-2
Acknowledgements
The authors would like to thank Mr. Ayumu Sasaki for developing guiding LODEM and Mr. Seungseong Han for developing portable LODEM.
Funding
The present study was supported in part by Japan Society for the Promotion of Science (JSPS) KAKENHI Grant Numbers 18K04065 and 16H01859.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethics approval
This article does not describe any studies with human or animal subjects.
Informed consent
This article does not contain patient data.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file1 (MOV 54824 kb)
Supplementary file2 (MP4 80294 kb)
Rights and permissions
About this article

Cite this article
Fukui, S., Kawai, T., Nishizawa, Y. et al. Locally operated assistant manipulators with selectable connection system for robotically assisted laparoscopic solo surgery. Int J CARS 16, 683–693 (2021). https://doi.org/10.1007/s11548-021-02338-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-021-02338-9