
Abstract
Purpose
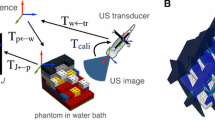
The three-dimensional (3D) ultrasound (US) imaging realized by continuous scanning of a region is of great value for medical diagnosis and robot-assisted needle insertion. During scanning, the contact force and posture between the probe and skin of the patient are crucial factors that determine the quality of US imaging. We propose a robotic system for automatic scanning of curved surfaces with a stable contact force and vertical contact posture (the probe is parallel to the normal of the surface at the contact point).
Methods
A 6-DOF robotic arm is used to hold and drive a two-dimensional (2D) US probe to complete automatic scanning. Further, a path-planning strategy is proposed to generate the scan path covering the selected area automatically. We also developed a novel force-measuring device based on optical waveguides to measure the distributed contact force and contact posture. Based on the measured force and posture, the robotic arm automatically adjusts the position and orientation of the probe and maintains a stable contact force and vertical contact posture at each scan point.
Results
The novel force-measuring device is easy to fabricate, integrates with the probe and has the capacity of measuring the force distributed on the contact surface and estimating the contact posture. The experimental results of automatic scanning of a US phantom and parts of the human body demonstrate that the proposed system performs well in automatically scanning curved surfaces, maintaining a stable contact force and vertical contact posture and producing a good quality 3D US volume.
Conclusion
An automatic US scanning robotic system with an optical waveguide-based force-measuring device was developed and tested successfully. Experimental results demonstrated the feasibility of the proposed system to scan the human body.












Similar content being viewed by others


References
Mahmoud MZ, Aslam M, Alsaadi M, Fagiri MA, Alonazi B (2019) Evolution of robot-assisted ultrasound-guided breast biopsy systems. J Radiat Res Appl Sci 11(1):89–97
Neubach Z, Shoham M (2010) Ultrasound-guided robot for flexible needle steering. IEEE Trans Biomed Eng 57(4):799–805
Neshat H, Cool DW, Barker K, Gardi L, Kakani N, Fenster A (2013) A 3D ultrasound scanning system for image guided liver interventions. Med Phys 40(11):112903
Huang Q, Zeng Z (2017) A review on real-time 3D ultrasound imaging technology. Biomed Res Int. https://doi.org/10.1155/2017/6027029
Agel FM, Lorenzo MJV (2005) Tridimensional (3D) ultrasonography. Rev Esp Enferm Dig 97(2):125–134
Saftoiu A, Gheonea DI (2009) Tridimensional (3D) endoscopic ultrasound—a pictorial review. J Gastrointest Liver Dis 18(4):501–505
Mercier L, Langø T, Lindseth F, Collins DL (2005) A review of calibration techniques for freehand 3-D ultrasound systems. Ultrasound Med Biol 31(4):143–165
Xu J, Jia ZZ, Song ZJ, Yang XD, Chen K, Liang P (2010) Three-dimensional ultrasound image-guided robotic system for accurate microwave coagulation of malignant liver tumours. Int J Med Robot Comput Assist Surg 6(3):256–268
Seitz PK, Baumann B, Johnen W, Lissek C, Seidel J, Bendl R (2019) Development of a robot-assisted ultrasound-guided radiation therapy (USgRT). Int J Comput Assist Radiol Surg 15(4):491–501
Gilbertson MW, Anthony BW (2015) Force and position control system for freehand ultrasound. IEEE Trans Robot 31(4):835–849
Karar ME (2018) A simulation study of adaptive force controller for medical robotic liver ultrasound guidance. Arab J Sci Eng 43(8):4229–4238
Lau K, Leun EYY, Chiu PWY, Yam Y, Lau JYW, Poon CCY (2016) A flexible surgical robotic system for removal of early-stage gastrointestinal cancers by endoscopic submucosal dissection. IEEE Trans Ind Inform 12(6):2365–2374
Kojcev R, Fuerst B, Zettinig O, Fotouhi J, Lee SC, Frisch B, Taylor R, Sinibaldi E, Navab N (2016) Dual-robot ultrasound-guided needle placement: closing the planning-imaging-action loop. Int J Comput Assist Radiol Surg 11(6):1173–1181
Jiang Z, Grimm M, Zhou M, Hu Y, Esteban J, Navab N (2020) Automatic force-based probe positioning for precise robotic ultrasound acquisition. IEEE Trans Ind Electron. https://doi.org/10.1109/TIE.2020.3036215
Jiang Z, Grimm M, Zhou M, Esteban J, Simson W, Zahnd G, Navab N (2020) Automatic normal positioning of robotic ultrasound probe based only on confidence map optimization and force measurement. IEEE Robot Autom Lett 5(2):1342–1349
Wu B, Huang Q (2016) A Kinect-based automatic ultrasound scanning system. In: International conference on advanced robotics and mechatronics (ICARM), pp 585–590
Virga S, Gobl R, Baust M, Navab N, Hennersperger C (2018) Use the force: deformation correction in robotic 3D ultrasound. Int J Comput Assist Radiol Surg 13(5):619–627
Esteban J, Simson W, Requena Witzig S, Rienmüller A, Virga S, Frisch B, Zettinig O, Sakara D, Ryang Y, Navab N, Hennersperger C (2018) Robotic ultrasound-guided facet joint insertion. Int J Comput Assist Radiol Surg 13(1):895–904
Merouche S, Allard L, Montagnon E, Soulez G, Bigras P, Cloutier G (2016) A robotic ultrasound scanner for automatic vessel tracking and three-dimensional reconstruction of B-mode images. IEEE Trans Ultrason Ferroelectr Freq Control 63(1):35–46
Burcher MR, Noble JA, Han L, Gooding M (2005) A system for simultaneously measuring contact force, ultrasound, and position information for use in force-based correction of freehand scanning. IEEE Trans Ultrason Ferroelectr Freq Control 52(8):1330–1342
Huang Q, Lan J, Li X (2019) Robotic arm based automatic ultrasound scanning for three-dimensional Imaging. IEEE Trans Ind Inform 15(2):1173–1182
Fujiwara E, Wu YT, Dos Santos MFM, Schenkel EA, Suzuki CK (2017) Development of a tactile sensor based on optical fiber specklegram analysis and sensor data fusion technique. Sens Actuator A-Phys 263:677–686
Fujiwara E, Ferreira M, Dos Santos MFM, Suzuki CK (2014) Flexible optical fiber bending transducer for application in glove-based sensors. IEEE Sens J 14(10):3631–3636
Ahmadi R, Packirisamy M, Dargahi J, Cecere R (2012) Discretely loaded beam-type optical fiber tactile sensor for tissue manipulation and palpation in minimally invasive robotic surgery. IEEE Sens J 12(1):22–32
Graumann C, Fuerst B, Hennersperger C, Bork F, Navab N (2016) Robotic ultrasound trajectory planning for volume of interest coverage. In: IEEE international conference on robotics and automation (ICRA), pp 736–741
Miller D, Lippert C, Vollmar V, Bozinov O, Benes L, Schulte DM, Sure U (2012) Comparison of different reconstruction algorithms for three dimensional ultrasound imaging in a neurosurgical setting. Int J Med Robot Comput Assist Surg 8(3):348–359
Gobbi DG, Peters TM (2002) Interactive intra-operative 3D ultrasound reconstruction and visualization. In: Proceedings of the international conference on medical image computing and computer-assisted intervention, pp 156–163
Chen S, Wang F, Lin Y, Shi Q, Wang Y (2021) Ultrasound-guided needle insertion robotic system for percutaneous puncture. Int J Comput Assist Radiol Surg. https://doi.org/10.1007/s11548-020-02300-1
Acknowledgements
We would like to thank Editage (www.editage.cn) for English language editing.
Funding
This study was funded by the National Natural Science Foundation of China (Grant No. 51575343).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Human and animals rights
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards. No animal experiments were performed in this study.
Informed consent
Informed consent was obtained from all participants.
Additional information
Publisher's Note
pringer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Chen, S., Li, Z., Lin, Y. et al. Automatic ultrasound scanning robotic system with optical waveguide-based force measurement. Int J CARS 16, 1015–1025 (2021). https://doi.org/10.1007/s11548-021-02385-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-021-02385-2