
Abstract
Purpose
Currently, self-retaining laryngoscopic surgery is not suitable for some patients, and there are dead zones relating to surgical field exposure and operation. The quality of the surgery can also be affected by the long periods of time required to complete it. Teleoperated continuum robots with flexible joints are expected to solve these issues. However, at the current stage of developing transoral robotic surgery systems, their large size affects the precision of surgical operative actions and there are high development and treatment costs.
Methods
We fabricated a flexible joint based on selective laser melting technology and designed a shallow neural network-based kinematic modeling approach for a continuum surgical robot. Then, human model and animal experiments were completed by master–slave teleoperation to verify the force capability and dexterity of the robot, respectively.
Results
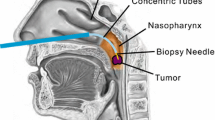
As verified by human model and animal experiments, the designed continuum robot was demonstrated to achieve transoral laryngeal surgical field exposure without laryngoscope assistance, with sufficient load capability to finish the biopsy of vocal fold tissue in living animals.
Conclusion
The designed continuum robotic system allows the biopsy of vocal fold tissue without laryngoscope assistance. Its stiffness and dexterity indicate the system’s potential for applications in the diagnosis and treatment of vocal fold nodules and polyps. The limitations of this robotic system as shown in the experiments were also analyzed.








Similar content being viewed by others


References
Wang S, Zhang C, Luo S, Cai S, Xu M (2020) Analysis of perioperative nursing effects of vocal cord polyp laser excision under self-retaining laryngoscope and microscope. Acta Microsc 29(5):2540–2547
Han F, Zhang L, Cheng S, Liang F (2017) Comparison of clinical applications of single-dose intravenous injection of mivacurium and cisatracurium in adult’s vocalcordpolyps resection under self-retaining laryngoscope. BIO Web Conf. 8:01051. https://doi.org/10.1051/bioconf/20170801051
Zou Y, Huang J, Zhang X, Liu Q, Li W, Peng S, Zhan S, Zeng Q (2004) Clinical application of laryngeal endoscopy in the minimally invasive surgery of laryngeal diseases. J Clin Otorhinolaryngol 18(3):152–154
Gugatschka M, Gerstenberger C, Friedrich G (2008) Analysis of forces applied during microlaryngoscopy: a descriptive study. Eur Arch Oto-Rhino-Laryngol 265(9):1083–1087. https://doi.org/10.1007/s00405-008-0586-z
Klussmann JP, Knoedgen R, Wittekindt C, Damm M, Eckel HE (2002) Complications of suspension laryngoscopy. Ann Otol Rhinol Laryngol 111(11):972–976. https://doi.org/10.1177/000348940211101104
Liang F, Chen R, Lin P, Han P, Cai Q, Huang X (2019) Two-handed tying technique in vocal fold mucosa microsuture for the treatment of Reinke’s edema. Eur Arch Oto-Rhino-Laryngol 276(7):2015–2022. https://doi.org/10.1007/s00405-019-05480-y
Lechien JR, Fakhry N, Saussez S, Chiesa-Estomba CM, Chekkoury-Idrissi Y, Cammaroto G, Melkane AE, Barillari MR, Crevier-Buchman L, Ayad T, Remacle M, Hans S (2020) Surgical, clinical and functional outcomes of transoral robotic surgery for supraglottic laryngeal cancers: a systematic review. Oral Oncol 109:104848. https://doi.org/10.1016/j.oraloncology.2020.104848
Alon EE, Wolf M (2019) Instrumentation in endoscopic laryngeal surgery. Op Tech Otolaryngol Head Neck Surg 30(4):243–248. https://doi.org/10.1016/j.otot.2019.09.004
Collins SR (2014) Direct and indirect laryngoscopy: equipment and techniques. Respir Care 59(6):850–864. https://doi.org/10.4187/respcare.03033
Vaughan CW (1993) Vocal fold exposure in phonosurgery. J Voice 7(2):189–194. https://doi.org/10.1016/S0892-1997(05)80350-9
Qin M, Liu Y, Wu K, Zhao Y, Ton B, Gao C, Li Y, Zhang L, Wang Y (2016) Use of self-retaining laryngoscope in difficult laryngealy exposure in laryngeal microsurgery. J Audiol Speech Pathol 24(2):135–137
Caldiroli D, Molteni F, Sommariva A, Frittoli S, Guanziroli E, Cortellazzi P, Orena EF (2014) Upper limb muscular activity and perceived workload during laryngoscopy: comparison of Glidescope® and Macintosh laryngoscopy in manikin: An observational study. Br J Anaesth 112(3):563–569. https://doi.org/10.1093/bja/aet347
Plinkert P, Löwenheim H (1997) Trends and perspectives in minimally invasive surgery in otorhinolaryngology-head and neck surgery. Laryngoscope 107(11):1483–1489. https://doi.org/10.1097/00005537-199711000-00011
Olds K, Hillel A, Kriss J, Nair A, Kim H, Cha E, Curry M, Akst L, Yung R, Richmon J, Taylor R (2012) A robotic assistant for trans-oral surgery: the robotic endo-laryngeal flexible (Robo-ELF) scope. J Robot Surg 6(1):13–18. https://doi.org/10.1007/s11701-011-0329-9
Lang S, Mattheis S, Hasskamp P, Lawson G, Güldner C, Mandapathil M, Schuler P, Hoffmann T, Scheithauer M, Remacle M (2017) A european multicenter study evaluating the flex robotic system in transoral robotic surgery. Laryngoscope 127(2):391–395. https://doi.org/10.1002/lary.26358
Burgner-Kahrs J, Rucker DC, Choset H (2015) Continuum robots for medical applications: a survey. IEEE Trans Robot 31(6):1261–1280. https://doi.org/10.1109/TRO.2015.2489500
Xu K, Zhao J, Fu M (2015) Development of the SJTU unfoldable robotic system (SURS) for single port laparoscopy. IEEE/ASME Trans Mechatron 20(5):2133–2145. https://doi.org/10.1109/TMECH.2014.2364625
Hwang M, Yang U-J, Kong D, Chung DG, Lim J-G, Lee D-H, Kim DH, Shin D, Jang T, Kim J-W, Kwon D-S (2017) A single port surgical robot system with novel elbow joint mechanism for high force transmission. Int J Med Robot Comput Assist Surg 13(4):1808. https://doi.org/10.1002/rcs.1808
Hong W, Xie L, Liu J, Sun Y, Li K, Wang H (2018) Development of a novel continuum robotic system for maxillary sinus surgery. IEEE/ASME Trans Mechatron 23(3):1226–1237. https://doi.org/10.1109/TMECH.2018.2818442
Hanna J, Brauer PR, Morse E, Judson B, Mehra S (2020) Is robotic surgery an option for early T-stage laryngeal cancer? Early nationwide results. Laryngoscope 130(5):1195–1201. https://doi.org/10.1002/lary.28144
Chan JYK, Wong EWY, Tsang RK, Holsinger FC, Tong MCF, Chiu PWY, Ng SSM (2017) Early results of a safety and feasibility clinical trial of a novel single-port flexible robot for transoral robotic surgery. Eur Arch Oto-Rhino-Laryngol 274(11):3993–3996. https://doi.org/10.1007/s00405-017-4729-y
Orosco RK, Tam K, Nakayama M, Holsinger FC, Spriano G (2019) Transoral supraglottic laryngectomy using a next-generation single-port robotic surgical system. Head Neck 41(7):2143–2147. https://doi.org/10.1002/hed.25676
Park YM, Kim DH, Kang MS, Lim JY, Choi EC, Koh YW, Kim SH (2019) The first human trial of transoral robotic surgery using a single-port robotic system in the treatment of laryngo-pharyngeal cancer. Ann Surg Oncol 26(13):4472–4480. https://doi.org/10.1245/s10434-019-07802-0
Remacle MMN, Prasad V, Lawson G, Plisson L, Bachy V, Van der Vorst S (2015) Transoral robotic surgery (TORS) with the Medrobotics Flex\(^{\rm TM}\) System: first surgical application on humans. Eur Arch Oto-Rhino-Laryngol 272(6):1451–1455. https://doi.org/10.1007/s00405-015-3532-x
Mattheis S, Hasskamp P, Holtmann L, Schäfer C, Geisthoff U, Dominas N, Lang S (2017) Flex Robotic System in transoral robotic surgery: the first 40 patients. Head Neck 39(3):471–475. https://doi.org/10.1002/hed.24611
Mattheis S, Hussain T, Höing B, Haßkamp P, Holtmann L, Lang S (2019) Robotics in laryngeal surgery. Op Tech Otolaryngol Head Neck Surg 30(4):284–288. https://doi.org/10.1016/j.otot.2019.09.012
Poon H, Li C, Gao W, Ren H, Lim CM (2018) Evolution of robotic systems for transoral head and neck surgery. Oral Oncol 87:82–88. https://doi.org/10.1016/j.oraloncology.2018.10.020
Hussain T, Lang S, Haßkamp P, Holtmann L, Höing B, Mattheis S (2020) The Flex robotic system compared to transoral laser microsurgery for the resection of supraglottic carcinomas: first results and preliminary oncologic outcomes. Eur Arch Oto-Rhino-Laryngol 277(3):917–924. https://doi.org/10.1007/s00405-019-05767-0
Cole AP, Leow JJ, Chang SL, Chung BI, Meyer CP, Kibel AS, Menon M, Nguyen PL, Choueiri TK, Reznor G, Lipsitz SR, Sammon JD, Sun M, Trinh Q-D (2016) Surgeon and hospital level variation in the costs of robot-assisted radical prostatectomy. J Urol 196(4):1090–1095. https://doi.org/10.1016/j.juro.2016.04.087
Wang W, Li J, Wang S, Su H, Jiang X (2016) System design and animal experiment study of a novel minimally invasive surgical robot. Int J Med Robot Comput Assist Surg 12(1):73–84. https://doi.org/10.1002/rcs.1658
Yi B, Wang G, Li J, Jiang J, Son Z, Su H, Zhu S, Wang S (2017) Domestically produced Chinese minimally invasive surgical robot system Micro Hand is applied to clinical surgery preliminarily in China. Surg Endosc 31(1):487–493. https://doi.org/10.1007/s00464-016-4945-3
Goldenberg D, Goldenberg MDF (2017) TORS with the Flex® robotic system. Atlas Head Neck Robot Surg 108:193–200. https://doi.org/10.1007/978-3-319-49578-1_19
Friedrich DT, Modes V, Hoffmann TK, Greve J, Schuler PJ, Burgner-Kahrs J (2018) Teleoperated tubular continuum robots for transoral surgery - feasibility in a porcine larynx model. Int J Med Robot Comput Assist Surg 14(5):1928. https://doi.org/10.1002/rcs.1928
Gu X, Li C, Xiao X, Lim CM, Ren H (2019) A compliant transoral surgical robotic system based on a parallel flexible mechanism. Ann Biomed Eng 47(6):1329–1344. https://doi.org/10.1007/s10439-019-02241-0
Kundrat D, Schoob A, Piskon T, Grässlin R, Schuler PJ, Hoffmann TK, Kahrs LA, Ortmaier T (2019) Toward assistive technologies for focus adjustment in teleoperated robotic non-contact laser surgery. IEEE Trans Med Robot Bion 1(3):145–157. https://doi.org/10.1109/TMRB.2019.2931438
Kundrat D, Graesslin R, Schoob A, Friedrich DT, Scheithauer MO, Hoffmann TK, Ortmaier T, Kahrs LA, Schuler PJ (2021) Preclinical performance evaluation of a robotic endoscope for non-contact laser surgery. Ann Biomed Eng 49(2):585–600. https://doi.org/10.1007/s10439-020-02577-y
Feng F, Hong W, Xie L (2020) Design of 3D-printed flexible joints with presettable stiffness for surgical robots. IEEE Access 8:79573–79585. https://doi.org/10.1109/ACCESS.2020.2991092
Kim J, Kwon S-I, Moon Y, Kim K (2021) A hand-held non-robotic surgical device to compensate for wire length in unpredicted paths. IEEE Access 9:60629–60639. https://doi.org/10.1109/ACCESS.2021.3073139
Feng F, Hong W, Xie L (2021) A learning-based tip contact force estimation method for tendon-driven continuum manipulator. Sci Rep 11(1):17482. https://doi.org/10.1038/s41598-021-97003-1
Benninger MS (2000) Microdissection or microspot CO2 laser for limited vocal fold benign lesions: a prospective randomized trial. Laryngoscope 110(211):1. https://doi.org/10.1097/00005537-200002001-00001
Wallis L, Jackson-Menaldi C, Holland W, Giraldo A (2004) Vocal fold nodule vs. vocal fold polyp: answer from surgical pathologist and voice pathologist point of view. J Voice 18(1):125–129. https://doi.org/10.1016/j.jvoice.2003.07.003
Author information
Authors and Affiliations
Contributions
The robotic system was developed by FF, WH and LX. YZ and KL performed the animal and human model experiments. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Funding
This work was supported in part by the National Natural Science Foundation of China under Grants 62133009, 61973211, 51911540479, M-0221, in part by the Science and Technology Commission of Shanghai Municipality under Grants 21550714200 and in part by the Project of Institute of Medical Robotics of Shanghai Jiao Tong University.
Conflict of interest
All authors declare that there is no conflict of interest.
Ethics approval
All procedures performed in studies involving animals were in accordance with the ethical standards of the Chinese Regulations for the Administration of Affairs Concerning Experimental Animals. The study was approved by the Animal Ethics Committee of Shanghai General Hospital (No. 2019AW044).
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Feng, F., Zhou, Y., Hong, W. et al. Development and experiments of a continuum robotic system for transoral laryngeal surgery. Int J CARS 17, 497–505 (2022). https://doi.org/10.1007/s11548-022-02558-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-022-02558-7