
Abstract
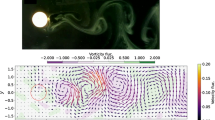
Previous studies reported that the hydrodynamic propulsion of the water strider also results from transferring momentum to the underlying fluid through hemispherical dipolar vortices shed by its driving legs. However, there are no accuracy experimental measurements of these vortical structures to prove the mechanics of vortical propulsion. Here, we reveal the vortical structures by reporting the simultaneous measurements of the water strider’s motion and the fluid velocity field with the high-speed PIV, and proposing a new method of calculating the vortex kinetic energy and vortex momentum. We found that the asymmetrical vortical structure in each dipolar vortex, generated by one driving stroke, propels the water strider forward, and the outer elliptic vortex is weaker than the inner circular vortex. The movement of the dipolar vortex is divided into two stages: (1) translating backward and (2) return curving. In this way, the water strider obtains the maximum velocity with minimal consumption of energy. The fluid vortical momentum, generated by the driving stroke, accounts for about 64–90% of the water strider’s momentum.
Graphical Abstract








Similar content being viewed by others


References
Buhler O (2007) Impulsive fluid forcing and water strider locomotion. J Fluid Mech 573:211–236
Bush JWM, Hu DL (2006) Walking on water: biolocomotion at the interface. Annu Rev Fluid Mech 38:339–369
Denny MW (1993) Air and water: the biology and physics of life’s media. Princeton University Press, New Jersey
Denny MW (2007) Paradox lost: answers and questions about walking on water. J Exp Biol 207:1601–1606
Floyd S, Keegan T, Palmisano J, Sitti M (2006) A novel water running robot inspired by basilisk lizards. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 5430–5436
Gao X, Jiang L (2004) Biophysics: water-repellent legs of water striders. Nature 432(7013):36
Hu DL, Bush JWM (2010) The hydrodynamics of water-walking arthropods. J Fluid Mech 644:5–33
Hu DL, Chan B, Bush JWM (2003) The hydrodynamics of water strider locomotion. Nature 424:663–666
Hu DL, Prakash M, Chan B, Bush JWM (2007) Water-walking devices. Exp Fluids 43:769–778
Keller JB (1998) Surface tension force on a partly submerged body. Phys Fluids 10:3009–3010
Panton RL (1984) Incompressible flow. Wiley Interscience Publication, New York
Song YS, Sitti M (2007) Surface tension driven biologically inspired water strider robots: theory and experiments. IEEE Trans Robotics 23(3):578–589
Song YS, Suhr SH, Sitti M (2006) Modeling of the supporting legs for designing biomimetic water strider robots. In: Proceedings of the 2006 IEEE International Conference on Robotics and Automation, pp 2303–2310
Suhr SH, Song YS, Lee SJ, Sitti M (2005) Biologically inspired miniature water strider robot. In: Proceedings of the Robotics Science and Systems I, pp 319–325
Taylor GK, Triantafyllou MS, Tropea C (eds) (2010) Animal locomotion. Springer, New York
Acknowledgments
The author would like to thank K. Yamada and H. Shimogawa for their assistance with the experiments.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Rinoshika, A. Vortical dynamics in the wake of water strider locomotion. J Vis 15, 145–153 (2012). https://doi.org/10.1007/s12650-011-0117-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12650-011-0117-7