
Abstract
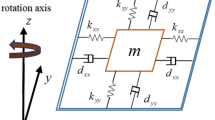
This paper aims to propose a more efficient neural network and applies it as an adaptive controller for the multi-input multi-output (MIMO) uncertain nonlinear systems. First, a more efficient fuzzy neural network named as fuzzy cerebellar model articulation controller (CMAC) is introduced, then an adaptive controller is proposed using a novel interval type-2 fuzzy CMAC (T2FCMAC). The T2FCMAC realizes an interval type-2 fuzzy logic system based on the structure of the CMAC. Due to the better ability of handling uncertainties provided by type-2 fuzzy sets, it can solve some complicated problems with outstanding effectiveness than type-1 fuzzy sets. In addition, an intelligent control system is proposed; this control system is comprised of a T2FCMAC and an auxiliary compensation controller. The T2FCMAC is utilized to approximate a perfect controller and the parameters of T2FCMAC are on-line tuned by the derived adaptive laws based on a Lyapunov function. The auxiliary compensation controller is designed to suppress the influence of residual approximation error between the perfect controller and the T2FCMAC. Finally, two MIMO uncertain nonlinear systems, a Chua’s chaotic circuit and a mass-spring-damper mechanical system, are performed to verify the effectiveness of the proposed control scheme. The simulation results confirm that the proposed intelligent adaptive control system can achieve favorable tracking performance with desired robustness.












Similar content being viewed by others

References
Yang W, Feng G, Zhang T (2014) Robust model predictive control for discrete-time Takagi-Sugeno fuzzy systems with structured uncertainties and persistent disturbances. IEEE Trans Fuzzy Syst 22(5):1213–1228
Chairez I (2013) Differential neuro-fuzzy controller for uncertain nonlinear systems. IEEE Trans Fuzzy Syst 21(2):369–384
Albus JS (1975) A new approach to manipulator control: the cerebellar model articulation controller (CMAC). Trans. ASME, J. Dyn. Syst. Meas. Control 97(3):220–227
Lin CM, Peng YF (2005) Missile guidance law design using adaptive cerebellar model articulation controller. IEEE Trans. Neural Netw. 16(3):636–644
Juang JG, Lee CL (2009) Applications of cerebellar model articulation controllers to intelligent landing system. J Univ Comput Sci 15(13):2586–2607
Chiang CT, Lin CS (1996) CMAC with general basis functions. Neural Netw. 9(7):1199–1211
Sim J, Tung WL, Qeuk C (2006) FCMAC-Yager: a novel yager-inference-scheme-based fuzzy CMAC. IEEE Trans Neural Netw 17(6):1394–1410
Yu W, Rodriguez FO, Moreno-Armendariz MA (2008) Hierarchical fuzzy CMAC for nonlinear systems modeling. IEEE Trans Fuzzy Syst 16(5):1302–1314
Lin CM, Chen LY, Yeung DS (2010) Adaptive filter design using recurrent cerebellar model articulation controller. IEEE Trans. Neural Netw. 21(7):1149–1157
Almedia PEM, Simoes MG (2003) Parametric CMAC networks fundamentals and applications of a fast convergence neural structure. IEEE Trans Ind Appl 39(5):1551–1557
Lee CH, Chang FY, Lin CM (2013) An efficient interval type-2 fuzzy CMAC for chaos time-series prediction and synchronization. IEEE Trans Cybern 99:1
Lin CM, Chen LY, Chen CH (2007) RCMAC hybrid control for MIMO uncertain nonlinear systems using sliding-mode technology. IEEE Trans Neural Netw 18(3):708–720
Yang TC, Juang JG (2010) Application of adaptive type-2 fuzzy CMAC to automatic landing system. In: 2010 international symposium on computational intelligence and design, Hangzhou, 29–31 October 2010, pp 221–224
Zadeh LA (1975) The concept of a linguistic variable and its application to approximate reasoning-1. Inf Sci 8(3):199–249
Mendel JM (2001) Uncertain rule-based fuzzy logic systems: introduction and new directions. Prentice-Hall, Englewood Cliffs
Hassan S, Khosravi A, Jaafar J, Khanesar MA (2016) A systematic design of interval type-2 fuzzy logic system using extreme learning machine for electricity load demand forecasting. Int J Electr Power Energy Syst 82:1–10
Kayacan E Khanesar MA (2016) Recurrent interval type-2 fuzzy control of 2-DOF helicopter with finite time training algorithm. In: 12th IFAC workshop on adaptation and learning in control and signal processing, pp 293–299
Zeghlache S, Benslimane T, Amardjia N, Bouguerra A (2017) Interval type-2 fuzzy sliding mode controller based on nonlinear observer for a 3-DOF helicopter with uncertainties. Int J Fuzzy Syst 19(5):1444–1463
Liang Q, Mendel JM (2000) Interval type-2 fuzzy logic systems: theory and design. IEEE Trans Fuzzy Syst 8(5):535–550
Hassan S, Khanesar MA, Jaafar J, Khosravi AB (2018) Optimal parameters of an ELM-based interval type-2 fuzzy logic system: a hybrid learning algorithm. Neural Comput Appl 29:1001–1014
Wang LX (1994) Adaptive fuzzy systems and control: design and stability analysis. Prentice-Hall, Englewood Cliffs
Lin CM, Li HY (2014) Intelligent control using wavelet fuzzy cerebella model articulation controller for two-axis LPCM drive systems. IEEE Trans Fuzzy Syst 22(4):791–802
Chang YC (2004) Robust H∞ control for a class of uncertain nonlinear time-varying systems and its application. IEE Proc Cont Theory Appl 151(5):601–609
Chang FY, Lee CH (2011) Interval type-2 recurrent fuzzy neural system designing via stable simultaneous perturbation stochastic approximation algorithm. In: 2011 IEEE international conference on fuzzy systems, pp 2155–2162
Chang YC, Yen HM (2005) Adaptive output feedback tracking control for a class of uncertain nonlinear systems using neural networks. IEEE Trans Syst Man Cybern B Cybern 35(6):1311–1316
Acknowledgements
The authors appreciate the financial support in part from the Nation Science Council of Republic of China under grant NSC 101-2221-E-155-026-MY3.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Lin, CM., Yang, MS. Type-2 fuzzy cerebellar model articulation control system design for MIMO uncertain nonlinear systems. Int. J. Mach. Learn. & Cyber. 11, 269–286 (2020). https://doi.org/10.1007/s13042-019-00972-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13042-019-00972-z