
Abstract
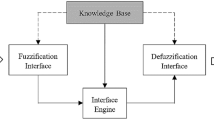
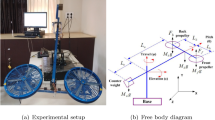
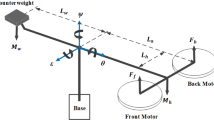
This paper develops an adaptive robust control scheme combined with optimal design for the unmanned helicopter tail reduction (UHTR) system. The dynamical model of the UHTR system with uncertainties is established. The uncertainties are assumed to be bounded and expressed by fuzzy set theory. With this prerequisite, an adaptive robust controller is proposed to drive the system to meet the trajectory requirements approximately. The adaptive law with leakage and dead zone is performance based and flexibly adjustable. By means of Lyapunov stability theorem, the UHTR system is both uniform bounded and uniform ultimate bounded with the proposed controller. The control scheme is deterministic rather than fuzzy if-then rules-based control. Moreover, the fuzzy performance index which contains the steady-state system performance and control cost is presented. In this way, the optimal design problem can be replaced by minimizing the performance index. Overall, the resulting control scheme can guarantee deterministic performance of the UHTR system and minimize the fuzzy performance index simultaneously.














Similar content being viewed by others
References
Alvarenga, J., Vitzilaios, N.I., Valavanis, K.P., Rutherford, M.J.: Survey of unmanned helicopter model-based navigation and control techniques. J. Intell. Robot. Syst. 80(1), 87–138 (2015)
Chen, X.X., Liu, Y., Hu, X.W., Qian, Y., Wang, J.H.: Velocity control of unmanned helicopter based on fuzzy-pid. Adv. Mater. Res. 756–759, 327–331 (2013)
Sanchez, E.N., Becerra, H.M., Velez, C.M.: Combining fuzzy, PID and regulation control for an autonomous mini-helicopter. Inf. Sci. 177(10), 1999–2022 (2007)
Jiang, T., Lin, D., Song, T.: Finite-time control for small scale unmanned helicopter with disturbances. Nonlinear Dyn. 96(3), 1747–1763 (2019)
Yokoyama, N.: Inference of aircraft intent via inverse optimal control including second-order optimality condition. J. Guid. Control Dyn. 41(2), 349–359 (2017)
Ma, H., Chen, M., Wu, Q.: Inverse optimal control for unmanned aerial helicopters with disturbances. Optim. Control Appl. Methods 40(1), 152–171 (2019)
Razzaghian, A., Moghaddam, R.K.: Adaptive fuzzy sliding mode control for a model-scaled unmanned helicopter. J. Fuzzy Set Valued Anal. 2016(3), 286–302 (2016)
Zeghlache, S., Benslimane, T., Amardjia, N., Bouguerra, A.: Interval type-2 fuzzy sliding mode controller based on nonlinear observer for a 3-DOF helicopter with uncertainties. Int. J. Fuzzy Syst. 19, 1444–1463 (2017)
Zhu, B.: Nonlinear adaptive neural network control for a model-scaled unmanned helicopter. Nonlinear Dyn. 78(3), 1695–1708 (2014)
Horn, J.F., Schmidt, E.M., Geiger, B.R., DeAngelo, M.P.: Neural network-based trajectory optimization for unmanned aerial vehicles. J. Guid. Control Dyn. 35(2), 548–562 (2012)
Chen, F., Jiang, B., Tao, G.: Fault self-repairing flight control of a small helicopter via fuzzy feedforward and quantum control techniques. Cogn. Comput. 4(4), 543–548 (2012)
Aboudonia, A., El-Badawy, A., Rashad, R.: Disturbance observer-based feedback linearization control of an unmanned quadrotor helicopter. Proc. Inst. Mech. Eng. Part I-J Syst Control Eng. 230(9), 877–891 (2016)
Li, R., Wu, Q., Chen, M.: Robust adaptive control for unmanned helicopter with stochastic disturbance. Procedia Comput. Sci. 105, 209–214 (2017)
Kang, Y., Chen, S., Wang, X., Cao, Y.: Deep convolutional identifier for dynamic modeling and adaptive control of unmanned helicopter. IEEE Trans. Neural Netw. Learn. Syst. 30(2), 524–538 (2018)
Yang, J.-H., Hsu, W.-C.: Adaptive backstepping control for electrically driven unmanned helicopter. Control Eng. Pract. 17(8), 903–913 (2009)
Blanco-Mesa, F., Merigó, J.M., Gil-Lafuente, A.M.: Fuzzy decision making: a bibliometric-based review. J. Intell. Fuzzy Syst. 32(3), 2033–2050 (2017)
Li, C., Tang, M., Zhang, G., Wang, R., Tian, C.: A hybrid short-term building electrical load forecasting model combining the periodic pattern, fuzzy system, and wavelet transform. Int. J. Fuzzy Syst. 22(1), 156–171 (2020)
Li, Y., Sui, S., Tong, S.: Adaptive fuzzy control design for stochastic nonlinear switched systems with arbitrary switchings and unmodeled dynamics. IEEE Trans. Cybern. 47(2), 403–414 (2016)
Xiang, X., Yu, C., Lapierre, L., Zhang, J., Zhang, Q.: Survey on fuzzy-logic-based guidance and control of marine surface vehicles and underwater vehicles. Int. J. Fuzzy Syst. 20(2), 572–586 (2018)
Dong, F., Chen, Y.H., Zhao, X.: Optimal design of adaptive robust control for fuzzy swarm robot systems. Int. J. Fuzzy Syst. 21(4), 1059–1072 (2019)
Zadeh, L.A.: Fuzzy sets. Inf. Control 8, 338–353 (1965)
Zadeh, L.A.: Outline of a new approach to the analysis of complex systems and decision processes. IEEE Trans. Syst. Man Cybern. 3(1), 28–44 (1973)
Mamdani, E.: Application of fuzzy logic to approximate reasoning using linguistic synthesis. IEEE Trans. Comput. 26(12), 1182–1191 (1977)
Takagi, T., Sugeno, M.: Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 15(1), 116–132 (1985)
Tong, S., Li, Y.: Adaptive fuzzy output feedback tracking backstepping control of strict-feedback nonlinear systems with unknown dead zones. IEEE Trans. Fuzzy Syst. 20(1), 168–180 (2011)
Tong, S., Sun, K., Sui, S.: Observer-based adaptive fuzzy decentralized optimal control design for strict-feedback nonlinear large-scale systems. IEEE Trans. Fuzzy Syst. 26(2), 569–584 (2017)
Li, Y., Sun, K., Tong, S.: Observer-based adaptive fuzzy fault-tolerant optimal control for SISO nonlinear systems. IEEE Trans. Cybern. 49(2), 649–661 (2018)
Liang, H., Zhang, L., Sun, Y., Huang, T.: Containment control of semi-Markovian multiagent systems with switching topologies. IEEE Trans. Syst. Man Cybern. Syst. (2019). https://doi.org/10.1109/TSMC.2019.2946248
Zhang, L., Lam, H.K., Sun, Y., Liang, H.: Fault detection for fuzzy semi-Markov jump systems based on interval type-2 fuzzy approach. IEEE Trans. Fuzzy Syst. (2019). https://doi.org/10.1109/TFUZZ.2019.2936333
Kalaba, R.E., Udwadia, F.E.: Lagrangian mechanics, Gauss principle, quadratic programming, and generalized inverses: new equations for non-holonomically constrained discrete mechanical systems. Q. Appl. Math. 52(2), 229–241 (1994)
Udwadia, F.E., Kalaba, R.E.: Explicit equations of motion for mechanical systems with nonideal constraints. J. Appl. Mech. 68(3), 462–467 (2000)
Udwadia, F.E., Kalaba, R.E.: Analytical dynamics: a new approach. Cambridge University Press, Cambridge (2007)
Bimbhra, P.S.: Electrical machinery. Khanna Publishers, Newzhi Delhi (1975)
Sun, H., Zhao, H., Huang, K., Qiu, M., Zhen, S., Chen, Y.-H.: A fuzzy approach for optimal robust control design of an automotive electronic throttle system. IEEE Trans. Fuzzy Syst. 26(2), 694–704 (2017)
Chen, Y.-H.: A new approach to the control design of fuzzy dynamical systems. J. Dyn. Syst. Meas. Control-Trans. ASME 133, 061019 (2011)
Xu, J., Fang, H., Zeng, F., Chen, Y.H., Guo, H.: Robust observer design and fuzzy optimization for uncertain dynamic systems. Int. J. Fuzzy Syst. 21(5), 1511–1523 (2019)
Sun, H., Yu, R., Chen, Y.-H., Zhao, H.: Optimal design of robust control for fuzzy mechanical systems: performance based leakage and confidence-index measure. IEEE Trans. Fuzzy Syst. 27(7), 1441–1455 (2019)
Wang, X., Zhao, H., Sun, Q., Chen, Y.-H.: A new highorder adaptive robust control for constraint following of mechanical systems. Asian J. Control 19(5), 1672–1687 (2017)
Chen, Y.: On the deterministic performance of uncertain dynamical systems. Int. J. Control 43(5), 1557–1579 (1986)
Hale, J.K.: Ordinary differential equations. Wiley, New York (1969)
Zhao, R., Chen, Y.-H., Jiao, S.: Optimal design of constraint-following control for fuzzy mechanical systems. IEEE Trans. Fuzzy Syst. 24(5), 1108–1120 (2015)
Acknowledgements
The research is supported by the “13th Five-Year” Special Technology Project for Army Aviation Equipment (No. 30103090201), and the Fundamental Research Funds for the Central Universities of China (No. PA2019GDPK0067; No. PA2019GDZC0101).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhao, H., Zhu, Z. & Sun, H. Adaptive Robust Control and Optimal Design for Fuzzy Unmanned Helicopter Tail Reduction. Int. J. Fuzzy Syst. 22, 1400–1415 (2020). https://doi.org/10.1007/s40815-020-00870-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-020-00870-5