
Abstract
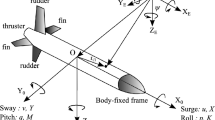
We present a novel control approach for trajectory tracking of an autonomous airship. First, the dynamics model and the trajectory control problem of an airship are formulated. Second, the sliding mode control law is designed to track a time-varying reference trajectory. To achieve better control performance, fuzzy adaptive sliding mode control is proposed in which the control gains are tuned according to fuzzy rules, and an adaptation law is used to guarantee that the control gains can compensate for model uncertainties of the airship. The stability of the closed-loop control system is proven via the Lyapunov theorem. Finally, simulation results illustrate the effectiveness and robustness of the proposed control scheme.
Similar content being viewed by others

References
Bagheri, A., Moghaddam, J.J., 2009. Simulation and tracking control based on neural-network strategy and sliding-mode control for underwater remotely operated vehicle. Neurocomputing, 72(7–9):1934–1950. [doi:10.1016/j.neucom.2008.06.008]
Cai, Z.L., 2006. Research on Dynamical Modeling and Nonlinear Control of a Stratospheric Airship. PhD Thesis, Shanghai Jiao Tong University, Shanghai, China (in Chinese).
Cai, Z.L., Qu, W.D., Xi, Y.G., 2007. Stabilization of an under-actuated bottom-heavy airship via inter-connection and damping assignment. Int. J. Robust Nonl. Control, 17(18):1690–1715. [doi:10.1002/rnc.1187]
Chu, A., Blackmore, M., 2007. Novel Concept for Stratospheric Communications and Surveillance: Star Light. AIAA Balloon System Conf., p.1–9.
Dong, C.Y., Xu, L.J., Chen, Y., 2009. Networked flexible spacecraft attitude maneuver based on adaptive fuzzy sliding mode control. Acta Astronaut., 65(11–12):1561–1570. [doi:10.1016/j.actaastro.2009.04.004]
Fateh, M.M., 2010. Robust fuzzy control of electrical manipulators. J. Intell. Robot. Syst., 60(3–4):415–434. [doi:10.1007/s10846-010-9430-y]
Filoktimon, R., Evangelos, P., 2008. Robotic Airship Trajectory Tracking Control Using a Backstepping Methodology. IEEE Int. Conf. on Robotics and Automation, p.188–193.
Lee, S.J., Lee, H.C., 2007. Backstepping Approach of Trajectory Tracking Control for the Mid-altitude Unmanned Airship. AIAA Guidance, Navigation and Control Conf. and Exhibition, p.1–14.
Li, J., Zhou, S., Xu, S., 2008. Fuzzy control system design via fuzzy Lyapunov functions. IEEE Trans. Syst. Man Cybern. B, 38(6):1657–1661. [doi:10.1109/TSMCB.2008.928224]
Li, X.R., Zhao, L.Y., Zhao, G.Z., 2005. Sliding mode control for synchronization of chaotic systems with structure or parameters mismatching. J. Zhejiang Univ. Sci., 6A(6):571–576. [doi:10.1631/jzus.2005.A0571]
Li, Y.W., Nahon, M., Sharf, I., 2009. Dynamics modeling and simulation of flexible airships. AIAA J., 47(3):592–605. [doi:10.2514/1.37455]
Liu, H.S., Zhu, S.Q., Chen, Z.W., 2010. Saturated output feedback tracking control for robot manipulators via fuzzy self-tuning. J. Zhejiang Univ.-Sci. C (Comput. & Electron.), 11(12):956–966. [doi:10.1631/jzus.C0910772]
Liu, J.K., 2008. Control System Design and Matlab Simulation of Robots. Tsinghua University Press, Beijing, China (in Chinese).
Moutinho, A., Azinheira, J.R., 2005. Stability and Robustness Analysis of the AURORA Airship Control System Using Dynamic Inversion. IEEE Int. Conf. on Robotics and Automation, p.2265–2270.
Murguia-Rendon, G., Rodriguez-Cortes, H., Velasco-Villa, M., 2009. Trajectory Tracking Control for the Planar Dynamics of a Thrust Vectored Airship. 52nd IEEE Int. Midwest Symp. on Circuits and System, p.329–332. [doi:10.1109/MWSCAS.2009.5236089]
Neila, M.B., Damak, T., 2011. Adaptive terminal sliding mode control for rigid robotic manipulators. Int. J. Autom. Comput., 8(2):215–220. [doi:10.1007/s11633-011-0576-2]
Schafer, I., Reimund, K., 2002. Airships as Unmanned Platforms: Challenge and Chance. AIAA’s Aircraft Technology, Integration, and Operations, p.1–10.
Sun, F.C., Sun, Z.Q., Feng, G., 1999. An adaptive fuzzy controller based on sliding mode for robot manipulators. IEEE Trans. Syst. Man Cybern. B, 29(4):661–667.
Tong, S.C., Li, H.X., 2003. Fuzzy adaptive sliding-mode control for MIMO nonlinear systems. IEEE Trans. Fuzzy Syst., 11(3):354–360. [doi:10.1109/TFUZZ.2003.812694]
Yang, J.G., Wang, K., Yang, H.Y., Zhang, J.M., 2000. A realtime adaptive control algorithm using neural nets with perturbation. J. Zhejiang Univ. Sci., 1(1):61–65. [doi:10.1631/jzus.2000.0061]
Yang, Y.N., Wu, J., Zheng, W., 2011a. Dynamics Modeling and Maneuverability Analysis of a Near-Space Earth Observation Platform. Proc. 5th Int. Conf. on Recent Advances in Space Technologies, p.223–226. [doi:10.1109/RAST.2011.5966828]
Yang, Y.N., Zheng, W., Wu, J., 2011b. Sliding Mode Control for a Near-Space Autonomous Airship. 2nd Int. Conf. on Electric Information and Control Engineering, p.3576–3579. [doi:10.1109/ICEICE.2011.5778198]
Yang, Y.N., Wu, J., Zheng, W., 2011c. Vector modeling and stability analysis of a near-space Earth observation platform. J. Natl. Univ. Defense Technol., 33(3):28–32 (in Chinese).
Yang, Y.N., Wu, J., Zheng, W., 2012. Design, modeling and control for a stratospheric telecommunication platform. Acta Astronaut., in press. [doi:10.1016/j.actaastro.2012.05.010]
Zhang, Y., 2009. Modeling and Control System Design for Autonomous Airship. PhD Thesis, Shanghai Jiao Tong University, Shanghai, China (in Chinese).
Zhang, Y., Qu, W.D., Xi, Y.G., Cai, Z.L., 2008a. Stabilization and trajectory tracking of autonomous airship’s planar motion. J. Syst. Eng. Electron., 19(5):974–981. [doi:10.1016/S1004-4132(08)60184-X]
Zhang, Y., Qu, W.D., Xi, Y.G., Cai, Z.L., 2008b. Adaptive stabilization and trajectory tracking of airship with neutral buoyancy. Acta Autom. Sin., 34(11):1437–1440. [doi:10.3724/SP.J.1004.2008.01437]
Author information
Authors and Affiliations
Corresponding author
Additional information
Project supported by the Hunan Provincial Innovation Foundation for Postgraduate (No. CX2011B005) and the National University of Defense Technology Innovation Foundation for Postgraduate (No. B110105), China
Rights and permissions
About this article
Cite this article
Yang, Yn., Wu, J. & Zheng, W. Trajectory tracking for an autonomous airship using fuzzy adaptive sliding mode control. J. Zhejiang Univ. - Sci. C 13, 534–543 (2012). https://doi.org/10.1631/jzus.C1100371
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1631/jzus.C1100371