Paper:
Parameter Setting and Driver Acceptability Evaluation of Steering Assistance System Using Impedance Control by Damping Ratio
Soichiro Hayakawa and Ryojun Ikeura
Graduate School of Engineering, Mie University
1577 Kuriyamachiya-cho, Tsu, Mie 514-8507, Japan

In this paper, we introduce an adaptation to steering assistance systems for providing impedance control. We also suggest using the damping ratio as a design guideline for the parameters of the impedance control. In our research, experiments were conducted with experimental participants using a driving simulator implementing the suggested steering assistance system. As a result of both subjective and objective evaluations, it was found that the suggested steering assistance system is better accepted by drivers than the conventional system. Moreover, the use of the damping ratio as an evaluation index facilitates the design of the impedance parameters. These results indicate the effectiveness of our suggested system.
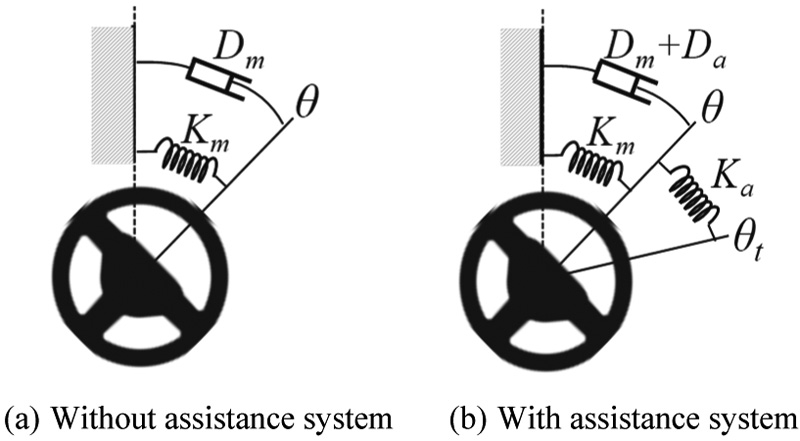
Steering wheel dynamics change
- [1] D. Uchino, T. Hirai, S. Arai, K. Ikeda, T. Kato, X. Liu, A. Endo, H. Kato, and T. Narita, “Active Steering Wheel System for Ultra-Compact Mobility Vehicles: Operability Evaluation with Steering Burden in Various Drivers,” J. Robot. Mechatron., Vol.33, No.5, pp. 1169-1177, 2021.
- [2] K. Suzuki, J. Lee, and A. Kanbe, “HMI Design when Using Level 2 Automated Driving Function – Effects of System Status Presentation Considering the Risk of Malfunction on Driver Behavior –,” J. Robot. Mechatron., Vol.32, No.3, pp. 520-529, 2020.
- [3] K. Yamamoto and H. Nishimura, “Control of Electric Power Steering Considering Steering Feeling and Maneuverability,” Proc. of the 53rd Japan Joint Automatic Control Conf., pp. 854-859, 2010 (in Japanese).
- [4] K. Nishikawa, K. Furukawa, I. Kawate, T. Miyazaki, T. Nouzawa, and T. Tsuji, “Analysis of Steering Wheel Operations Based on Human Arm Mechanical Properties,” Trans. of the JSME, Vol.81, No.831, Article No.15-00023, 2015 (in Japanese).
- [5] Y. Satomi, T. Murano, M. Aga, and T. Yonekawa, “A Characteristic Analysis of Driving Behavior to Rear-End Collision Warning Using a Driving Simulator,” The Proc. of the 18th Transportation and Logistics Conf., pp. 283-286, 2009 (in Japanese).
- [6] M. Nagai, H. Inoue, M. Kamata, and M. Okuwa, “Autonomous Driving Intelligence System to Enhance Safe and Secured Traffic Society for Elderly Drivers,” LIFE2013, Article No.SP2-1-3, 2013.
- [7] C. Braeuchle, F. Flehmig, W. Rosenstiel, and T. Kropf, “Driver Influence on Active Pedestrian Protection Systems with Combined Braking and Steering,” Proc. of 2nd Int. Symp. on Future Active Safety Technology Toward Zero Traffic Accident (FAST’13), Article No.TS1-1-6, 2013.
- [8] H. Nakamura, K. Nakano, F. Fang, R. Zheng, M. Ohori, S. Kawahara, and T. Takagi, “Implementation of Haptic Guidance Steering System on a Driving Simulator,” The Proc. of the 20th Transportation and Logistics Conf., pp. 269-272, 2011 (in Japanese).
- [9] J. Carlier and T. Murakami, “Virtual Force Field Based of Force-Feedback of Road Condition for Driving Assistant Design in Electric Vehicle,” Int. J. Automation Technol., Vol.5, No.6, pp. 908-915, 2011.
- [10] N. Hogan, “Impedance Control: An Approach to Manipulation: Part I—Theory,” J. of Dynamic Systems, Measurement, and Control, Vol.107, No.1, pp. 1-7, 1985.
- [11] N. Hogan, “Impedance Control: An Approach to Manipulation: Part II—Implementation,” J. of Dynamic Systems, Measurement, and Control, Vol.107, No.1, pp. 8-16, 1985.
- [12] N. Hogan, “Impedance Control: An Approach to Manipulation: Part III—Applications,” J. of Dynamic Systems, Measurement, and Control, Vol.107, No.1, pp. 17-24, 1985.
- [13] H. Kazerooni, “Human/Robot Interaction via the Transfer of Power and Information Signals. I. Dynamics and Control Analysis,” Proc. of 1989 Int. Conf. on Robotics and Automation, Vol.3, pp. 1632-1640, 1989.
- [14] H. Kazerooni and J. Guo, “Human Extenders,” J. of Dynamic Systems, Measurement, and Control, Vol.115, No.2B, pp. 281-290, 1993.
- [15] H. Konosu, I. Araki, and Y. Yamada, “Practical Development of Skill-Assist,” J. of the Robotics Society of Japan, Vol.22, No.4, pp. 508-514, 2004 (in Japanese).
- [16] T. Kotoku, E. Hüsler, K. Tanie, and A. Fujikawa, “The Development of a Direct Drive Master Arm,” J. Robot. Mechatron., Vol.2, No.6, pp. 463-470, 1990.
- [17] K. Kosuge, Y. Fujisawa, and T. Fukuda, “Control of Man-Machine System Based on Virtual Tool Dynamics,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.60, No.572, pp. 1337-1343, 1994 (in Japanese).
- [18] E. Yamanaka, T. Murakami, and K. Ohnishi, “Cooperative Motion Control by Human and Mobile Manipulator Using Equivalent Mass Matrix and Virtual Impedance,” IEEJ Trans. on Industry Applications, Vol.123, No.10, pp. 1227-1233, 2003 (in Japanese).
- [19] T. Tsumugiwa, Y. Takeuchi, and R. Yokogawa, “Maneuverability of Impedance-Controlled Motion in a Human-Robot Cooperative Task System,” J. Robot. Mechatron., Vol.29, No.4, pp. 746-756, 2017.
- [20] R. Ikeura, H. Inooka, and K. Mizutani, “Subjective Evaluation for Maneuverability of a Robot Cooperating with Humans,” J. Robot. Mechatron., Vol.14, No.5, pp. 514-519, 2002.
- [21] R. Fukui, Y. Kusakabe, R. Ikeura, and S. Hayakawa, “Impedance Control Considering Velocity Saturation of a Series Elasticity System with a Motor,” J. Robot. Mechatron., Vol.33, No.4, pp. 833-842, 2021.
- [22] R. Ikeura, T. Moriguchi, and K. Mizutani, “Variable Impedance Characteristics of Human Arms in Cooperative Motion by Two Humans and its Application to the Control of a Robot,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.73, No.725, pp. 251-257, 2007 (in Japanese).
- [23] H. Okuda, S. Hayakawa, T. Suzuki, and N. Tsuchida, “Parameter Design of Switched Assist Controller for Man-Machine Cooperative System with Human Behavior Model Based on Hybrid System,” IEEJ Trans. on Industry Applications, Vol.128, No.6, pp. 810-818, 2008 (in Japanese).
- [24] A. Yamaguchi, H. Okuda, T. Suzuki, S. Hayakawa, R. Ikeura, K. Muto, and T. Ito, “Supervisory Cooperative Control and its Verification,” Proc. of the 2016 JSAE Annual Cong. (Spring), pp. 1593-1598, 2016 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.