Paper:
Navigation of a Quadrotor Based on Voronoi Division Calculated from Local Information
Kimiko Motonaka
 and Seiji Miyoshi
and Seiji Miyoshi
Kansai University
3-3-35 Yamate-cho, Suita, Osaka 564-8680, Japan

This study applies a successful collision-avoidance method using buffered Voronoi cells (BVC) to control quadrotors. In particular, we consider the case of dealing with stationary obstacles using only the local information obtained from sensors, which has not been discussed in previous studies. In this study, we assume an unknown environment with grid-shaped obstacles. We demonstrate that four quadrotors can compute the information required for the BVC-based collision avoidance algorithm and move in the same environment without communicating with each other or receiving information from a central controller, using the local information obtained from the mounted 3D LiDAR. Simulations indicate that the system can handle static obstacles using point-cloud data obtained using 3D LiDAR as Voronoi seeds. We also demonstrate that the BVC-based collision avoidance algorithm can be applied to quadrotors controlled by a simple PD position controller without any modification to the controller. These findings show that the BVC-based collision avoidance can be easily implemented using existing commercial drones.
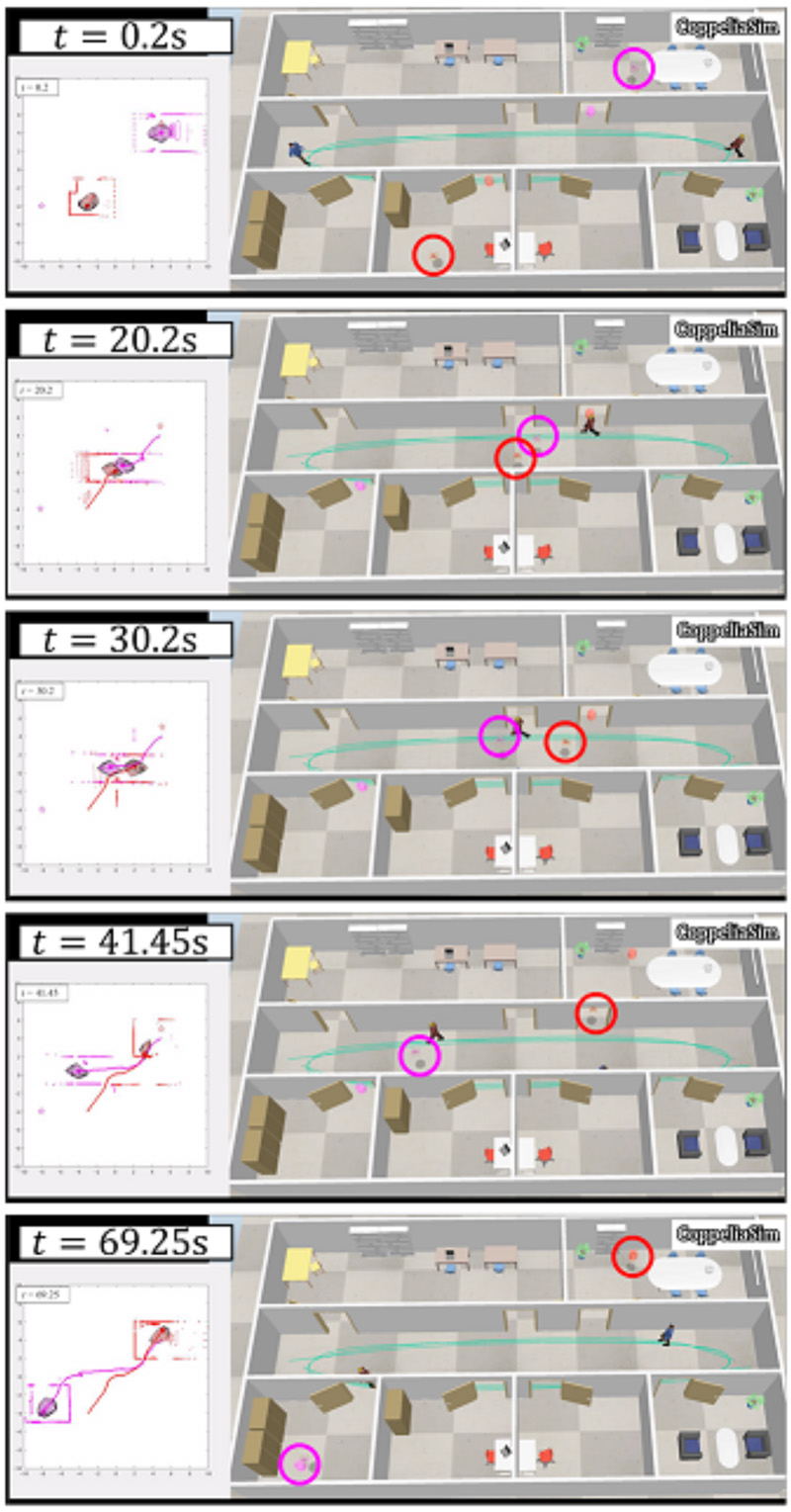
Two quadrotors moving based on Voronoi division
- [1] C. Wang, J. Wang, X. Zhang, and X. Zhang, “Autonomous navigation of UAV in large-scale unknown complex environment with deep reinforcement learning,” 2017 IEEE Global Conf. on Signal and Information Processing (GlobalSIP), pp. 858-862, 2017. https://doi.org/10.1109/GlobalSIP.2017.8309082
- [2] R. P. Padhy, S. K. Choudhury, P. K. Sa, and S. Bakshi, “Obstacle avoidance for unmanned aerial vehicles: Using visual features in unknown environments,” IEEE Consumer Electronics Magazine, Vol.8, No.3, pp. 74-80, 2019. https://doi.org/10.1109/MCE.2019.2892280
- [3] S. Ramasamy and R. Sabatini, “A unified approach to cooperative and non-cooperative Sense-and-Avoid,” 2015 Int. Conf. on Unmanned Aircraft Systems (ICUAS), pp. 765-773, 2015. https://doi.org/10.1109/ICUAS.2015.7152360
- [4] D. González, J. Pérez, V. Milanés, and F. Nashashibi, “A review of motion planning techniques for automated vehicles,” IEEE Trans. on Intelligent Transportation Systems, Vol.17, No.4, pp. 1135-1145, 2016. https://doi.org/10.1109/TITS.2015.2498841
- [5] J. Ji, A. Khajepour, W. W. Melek, and Y. Huang, “Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints,” IEEE Trans. on Vehicular Technology, Vol.66, No.2, pp. 952-964, 2017. https://doi.org/10.1109/TVT.2016.2555853
- [6] N. Gageik, P. Benz, and S. Montenegro, “Obstacle detection and collision avoidance for a UAV with complementary low-cost sensors,” IEEE Access, Vol.3, pp. 599-609, 2015. https://doi.org/10.1109/ACCESS.2015.2432455
- [7] Y. Peng et al., “The obstacle detection and obstacle avoidance algorithm based on 2-D lidar,” 2015 IEEE Int. Conf. on Information and Automation, pp. 1648-1653, 2015. https://doi.org/10.1109/ICInfA.2015.7279550
- [8] M. Lin, J. Xiaoming, and Q. Fei, “A robot obstacle avoidance method based on improved genetic algorithm,” 2018 11th Int. Conf. on Intelligent Computation Technology and Automation (ICICTA), pp. 327-331, 2018. https://doi.org/10.1109/ICICTA.2018.00081
- [9] Y. Xiuxia, Z. Yi, and Z. Weiwei, “Obstacle avoidance method of three-dimensional spherical obstacle cap,” J. of Systems Engineering and Electronics, Vol.29, No.5, pp. 1058-1068, 2018. https://doi.org/10.21629/JSEE.2018.05.16
- [10] D. Zhou, Z. Wang, S. Bandyopadhyay, and M. Schwager, “Fast, on-line collision avoidance for dynamic vehicles using buffered Voronoi cells,” IEEE Robotics and Automation Letters, Vol.2, No.2, pp. 1047-1054, 2017. https://doi.org/10.1109/LRA.2017.2656241
- [11] J. van den Berg, M. Lin, and D. Manocha, “Reciprocal velocity obstacles for real-time multi-agent navigation,” 2008 IEEE Int. Conf. on Robotics and Automation, pp. 1928-1935, 2008. https://doi.org/10.1109/ROBOT.2008.4543489
- [12] J. van den Berg, S. J. Guy, M. Lin, and D. Manocha, “Reciprocal n-body collision avoidance,” Proc. of the 14th Int. Symp. of Robotic Research, pp. 3-19, 2011. https://doi.org/10.1007/978-3-642-19457-3_1
- [13] A. Giese, D. Latypov, and N. M. Amato, “Reciprocally-rotating velocity obstacles,” 2014 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3234-3241, 2014. https://doi.org/10.1109/ICRA.2014.6907324
- [14] S. Bandyopadhyay, S.-J. Chung, and F. Y. Hadaegh, “Probabilistic swarm guidance using optimal transport,” 2014 IEEE Conf. on Control Applications (CCA), pp. 498-505, 2014. https://doi.org/10.1109/CCA.2014.6981395
- [15] M. Wang, Z. Wang, S. Paudel, and M. Schwager, “Safe distributed lane change maneuvers for multiple autonomous vehicles using buffered input cells,” 2018 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4678-4684, 2018. https://doi.org/10.1109/ICRA.2018.8460898
- [16] M. Wang and M. Schwager, “Distributed collision avoidance of multiple robots with probabilistic buffered Voronoi cells,” 2019 Int. Symp. on Multi-Robot and Multi-Agent Systems (MRS), pp. 169-175, 2019. https://doi.org/10.1109/MRS.2019.8901101
- [17] H. Zhu and J. Alonso-Mora, “B-UAVC: Buffered uncertainty-aware Voronoi cells for probabilistic multi-robot collision avoidance,” 2019 Int. Symp. on Multi-Robot and Multi-Agent Systems (MRS), pp. 162-168, 2019. https://doi.org/10.1109/MRS.2019.8901092
- [18] H. Zhu, B. Brito, and J. Alonso-Mora, “Decentralized probabilistic multi-robot collision avoidance using buffered uncertainty-aware Voronoi cells,” Autonomous Robots, Vol.46, No.2, pp. 401-420, 2022. https://doi.org/10.1007/s10514-021-10029-2
- [19] A. Pierson, W. Schwarting, S. Karaman, and D. Rus, “Weighted buffered Voronoi cells for distributed semi-cooperative behavior,” 2020 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 5611-5617, 2020. https://doi.org/10.1109/ICRA40945.2020.9196686
- [20] E. Rohmer, S. P. N. Singh, and M. Freese, “V-REP: A versatile and scalable robot simulation framework,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1321-1326, 2013. https://doi.org/10.1109/IROS.2013.6696520
- [21] K. Motonaka and S. Miyoshi, “Obstacle avoidance using buffered Voronoi cells based on local information from a laser range scanner,” Advanced Robotics, Vol.37, Nos.1–2, pp. 73-86, 2023. https://doi.org/10.1080/01691864.2022.2121616
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.