Review:
Understanding of Falling Cat Phenomenon and Realization by Robot
Takashi Kawamura
Shinshu University, 3-15-1 Tokida, Ueda, Nagano 386-8567, Japan

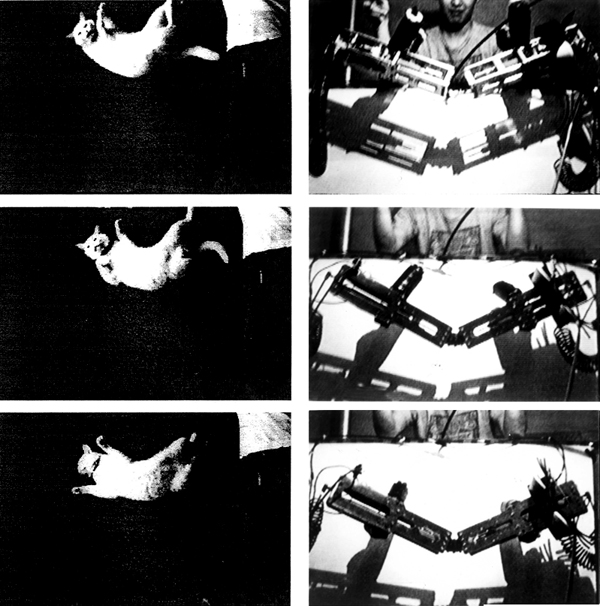
Cat-turn by cat and robotic cat
- [1] C. Froehlich, “The Physics of Somersaulting and Twisting,” Scientific American, p. 242, March 1983.
- [2] T. R. Kane and M. P. Scher, “A Dynamical Explanation of the Falling Cat Phenomenon,” Int. J. of Solid and Structure, Vol.5, Issue 7, pp. 663-670, July 1969.
- [3] F. Kosa, M. Kamimura, and Y. Hayashi, “Discussion on Conservation of angular momentum which performing to overlap inertia twist and non-inertial twist simultaneously,” Bulletin of Institute of Sports Science, Faculty of Physical Education, Tokyo University of Education, p. 11, 1973 (in Japanese).
- [4] T. Kawamura, K. Yamafuji, and T. Kobayashi, “Study on Posture Control and Soft Landing of a Free Falling Robot: 1st Report, Posture Control by Turning Motion of a Cat,” Trans. of Japan Society of Mechanical Engineers (JSME), Vol.57, No.544, pp. 3895-3900, 1991 (in Japanese).
- [5] K. Yamafuji, T. Kobayashi, and T. Kawamura, “Elucidation of Twisting. Motion of a Falling Cat and its Realization by a Robot,” J. of Robotic Society of Japan, Vol.10, No.5, p. 648, 1992 (in Japanese).
- [6] T. Kawamura, T. Kobayashi, and K. Yamafuji, “A Study of Postural Control of Robot at Free Fall,” Proc. of the 1st Japanese-French Congress of Mechatronics, Besanson, p. 141, 1992.
- [7] M. Uno, “Rubber Artificial Muscle and Application to Robot,” Hydraulics and Pneumatics, Vol.17, No.3, pp. 175-180, 1986 (in Japanese).
- [8] T. Kawamura, K. Yamafuji, and T. Kobayashi, “Motion Control of Vertebrate-type Backbones Driven by Rubber Muscles,” Proc. of Conf. of Fluid Engineering, JSME, pp. 406-408, 1992.
- [9] T. Kawamura, K. Yamafuji, K. Tanaka et al., “Principle of Cat-Turn Motion and Realization of Cat-Turning by a Robot with Vertebrate-Type Backbones Driven by Rubber Actuators,” Int. J. of Mechanics and Control, Vol.1, No.1, pp. 19-34, 2000.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.