Paper:
Design and Application of a Data-Driven Expert Controller Based on the Operating Data of a Skilled Worker
Hiroki Matsumori*, Shin Wakitani**, and Mingcong Deng*
*Graduate School of Engineering, Tokyo University of Agriculture and Technology
2-24-16 Nakacho, Koganei, Tokyo 184-8588, Japan
**Institute of Engineering, Hiroshima University
1-4-1 Kagamiyama, Higashi-hiroshima, Hiroshima 739-8527, Japan

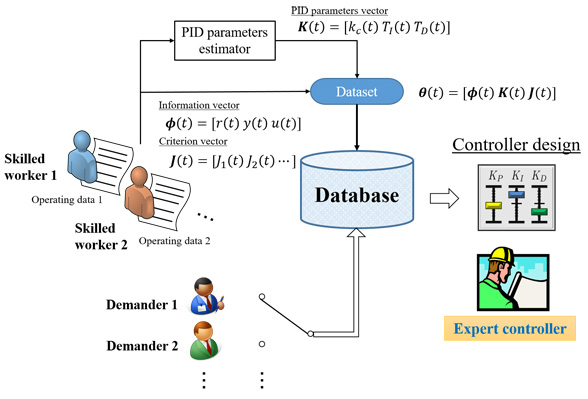
Schematic of data-driven expert controller
- [1] A. Stenman, F. Gustafsson, and L. Ljung, “Just In Time Models For Dynamical Systems,” Proc. of the 36th IEEE the Int. Conf. on Decision and Control, Kobe, Japan, pp. 1115-1120, Dec. 1996.
- [2] Q. Zheng and H. Kimura, “Just-In-Time PID Control,” Proc. of the 44th Japan Joint Automatic Control Conf., Yokohama, Japan, pp. 336-339, Nov. 1996.
- [3] N. Nakpong and S. Yamamoto, “Just-In-Time Predictive Control for a Two-Wheeled Robot,” Proc. The 10th Int. Conf. on ICT and Knowledge Engineering, Yokohama, Japan, pp. 95-98, Nov. 2012.
- [4] G. Bontempi, M. Birattari, and H. Bersini, “Lazy Learning For Local Modelling And Control Design,” Int. J. of Control, Vol.72, pp. 643-658, 1999.
- [5] J. Zhang, Y. Yim, and J. Yang, “Intelligent Selection of Instances for Prediction Functions in Lazy Learning Algorithms,” Artificial Intelligence Review, Vol.11, pp. 175-191, 1997.
- [6] T. Yamamoto, K. Takao, and T. Yamada, “Design of a Data-Driven PID Controller,” IEEE Trans. on Control Systems Technology, Vol.17, No.1, pp. 29-39, 2009.
- [7] S. Wakitani, K. Nishida, M. Nakamoto, and T. Yamamoto, “Design of a Data-Driven PID Controller Using Operating Data,” Proc. of the 11th IFAC Int. Workshop on Adaptation and Learning in Control and Signal Processing, Caen, France, pp. 587-592, Jul. 2013.
- [8] M. Kato, T. Yamamoto, and S. Fujisawa, “A Skill-Based PID Controller Using Artificial Neural Networks,” Proc. of Int. Conf. on Computer Intelligence for Modeling, Control and Automation, Vienna, Austria, pp. 702-707, Nov. 2005.
- [9] S. Mori, A. Sakaguchi, and T. Yamamoto, “Design and Experimental Evaluation of a Data-Driven Skill-Based PID Controller,” Proc. of Advanced Intelligent Mechatronics, Zurich, Switzerland, pp. 1-5, Sep. 2007.
- [10] K. Koiwai, K. Kawada, and T. Yamamoto, “Design of a Human-Skill based on PID Controller Using Cmacs,” Proc. of 2008 Int. Conf. on Control, Automation and Systems, Seoul, South Korea, pp. 64-68, Oct. 2008.
- [11] S. Wakitani and M. Deng, “Design of a Data-Driven Expert Controller,” Proc. of the 10th Asian Control Conf., Kota Kinabalu, Malaysia, pp. 1019-1022, May 2015.
- [12] J. Kennedy and R. Eberhart, “Particle Swarm Optimization,” Proc. of IEEE the Int. Conf. on Neural Networks, Perth, Australia, pp. 1942-1948, Nov. 1995.
- [13] K. Takao, T. Yamamoto, and T. Hinamoto, “A Design of Memory-Based PID Controllers,” Trans. of the Society of Instrument and Control Engineers, Sapporo, Japan, Vol.40, No.9, pp. 898-905, 2004 (in Japanese).
- [14] C. G. Atkeson, A. W. Moore, and S. Schaal, “Locally weighted learning for control,” Artificial Intelligence Review, Vol.11, pp. 75-113, 1997.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.