Paper:
Evaluation for Task Achievement of Robotics Programming Based on Image Information
Yoshihiro Ohnishi*, Shogo Takechi*, Teruyuki Tamai*, Shinnosuke Mori*, and Kazuo Kawada**
*Faculty of Education, Ehime University
3 Bunkyo-cho, Matsuyama, Ehime 790-8577, Japan
**Hiroshima University
1-1-1 Kagamiyama, Higashi-hiroshima, Hiroshima 739-8524, Japan

It is difficult to make an evaluation based solely on whether programming has been achieved. However, appropriate evaluation according to the achievement level leads to learners’ subjective programming learning, and to learning support that corresponds to individuals. Therefore, the quantitative evaluation of programming learning is as important as teaching and educational methods. Since programming education is being introduced to elementary and junior high schools, a programming evaluation method for this age is necessary. Therefore, this paper proposes a new concept of quantitatively evaluating the degree of achievement of tasks by programming. It assumes a unit in junior high school technology classes for learning measurement control, and uses teaching materials that have an autonomous cleaning robot as a theme. It is aimed at quantitatively evaluating the degree of accomplishment of a task by evaluating the extent to which the robot ran in a field, as seen in the room from a still picture taken multiple times.
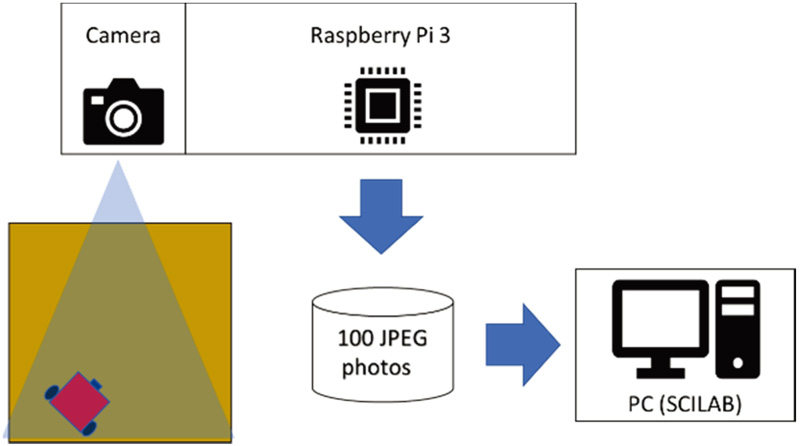
The moving of the robot was analyzed on SCILAB by the 100 JPEG photos
- [1] Y. Ohnishi, K. Honda, R. Nishioka, S. Mori, and K. Kawada, “Robotics Programming Learning for Elementary and Junior High School Students,” J. Robot. Mechatron., Vol.29, No.6, pp. 992-998, 2017.
- [2] T. Jenkins, “On the Difficulty of Learning to Program,” Proc. of the 3rd Annu. LTSN_ICS Conf., Loughborough University, pp. 53-58, 2002.
- [3] B. Huang and S. L. Shah, “Performance Assessment of Control Loops: Theory and Applications,” Springer, 1999.
- [4] M. Jelali, “An overview of control performance assessment technology and industrial applications,” Control Engineering Practice, Vol.14, pp. 441-466, 2006.
- [5] M. Jelali, “Control Performance Management in Industrial Automation,” Springer, 2013.
- [6] Y. Ohnishi, “Control Performance Assessment Method as Assessment of Programming Learning Achievement,” J. of Robotics Networking and Artificial Life, Vol.5, No.3, pp. 180-183, 2018.
- [7] T. Wang, X. Su, P. Ma, Y. Wang, and K. Wang, “Ability-training-oriented automated assessment in introductory programming,” Computers & Education, Vol.56, Issue 1, pp. 220-226, 2011.
- [8] M. S. S. Lopes, J. O. Brito, R. M. P. Trindade, A. F. da Silva, and A. C. de C. Lima, “Usability Evaluation of a Control and Programming Environment for Programming Education,” Int. J. of Software Engineering & Applications (IJSEA), Vol.7, No.4, pp. 11-21, 2016.
- [9] W. Sohn, “Design and Evaluation of Computer Programming Education Strategy Using Arduino,” Advanced Science and Technology Letters, Vol.66, pp. 73-77, 2014.
- [10] N. Mallios and M. G. Vassilakopoulos, “Evaluating Students’ Programming Skillbehaviour and Personalizing Their Computer Learning Environment Using ‘The Hour of Code’ Paradigm,” Proc. of Int. Conf. e-Learning 2015, pp. 131-135, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.