Paper:
Improvement of the Mobility on the Step-Field for a Stair Climbable Robot with Passive Crawlers
Junji Hirasawa
Department of Electronics and Control Engineering, National Institute of Technology, Ibaraki College
866 Nakane, Hitachinaka, Ibaraki 312-8508, Japan

This paper describes about improvements in the mobility of a stair climbable mobile robot on a step-field. A step-field, standardized by the National Institute of Standards and Technology (NIST), is a simulated artificial rough terrain used for testing rescue robots. Its use was popularized worldwide in the RoboCup Rescue contest, but a method for evaluating test results from it has yet to be established sufficiently. The author of this paper attempts to evaluate the mobility of stair climbable mobile robots on step-fields. A novel method using the 2 parameters of yaw-angle error and lateral position error is proposed. Two actual robots, SMART-IV type A and SMART-IV type B, are constructed and evaluated on small step-fields. The test results indicate that both robots can traverse the step-field under some appropriate conditions, but a comparison of the results indicates that the proposed design changes may be declared an improvement of the robot.
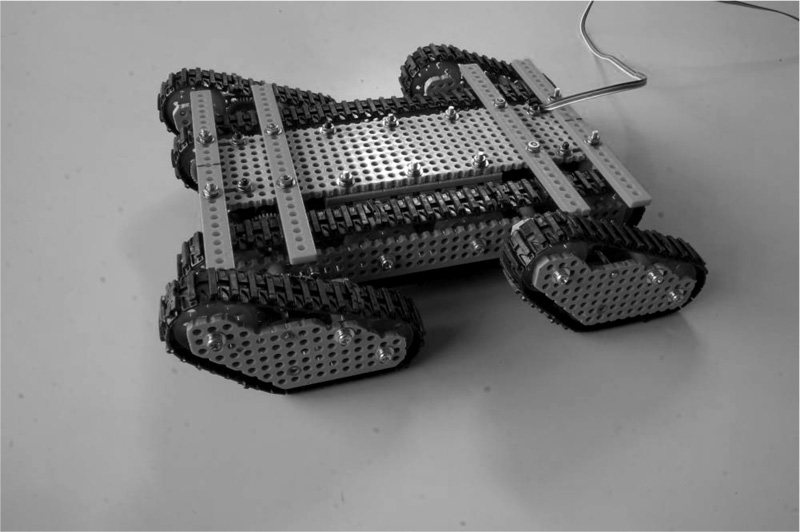
Test vehicle that had additional crawlers
- [1] T. Iwamoto et al., “Development of Terrain-Adaptable Mobile Mechanism for Actual Indoor Passage,” J. of the Robotics Society of Japan, Vol.6, No.1, pp. 67-74, 1988 (in Japanese).
- [2] K. Ueda et al., “Development of HELIOS IX: An Arm-Equipped Tracked Vehicle,” J. Robot. Mechatron., Vol.23, No.6, pp. 1031-1040, 2011.
- [3] H. K. Jeong et al., “Driving Mode Decision in the Obstacle Negotiation of a Variable Single-Tracked Robot,” Advanced Robotics, Vol.22, pp. 1421-1438, 2008.
- [4] A. Kamimura, “A Crawler Robot Mechanism Enabling High-Step Climbing (Realization of Automatic Climbing Motion),” Trans. of the JSME, Vol.75, No.758, pp. 2742-2749, 2009 (in Japanese).
- [5] Y. Asai et al., “Wheel-Based Stair Climbing Robot with Hopping Mechanism – Demonstration of Continuous Stair Climbing Using Vibration –,” J. Robot. Mechatron., Vol.20, No.2, pp. 221-227, 2008.
- [6] K. Osuka and H. Kitajima, “Development of Four-Crawler Multilink Mobile Robot MOIRA for Searching Debris,” J. Robot. Mechatron., Vol.15, No.5, pp. 561-570, 2003.
- [7] G. Lan and S. Ma, “Quasi-Static Analysis of a Novel Crawler-Driven Robot Motion,” J. Robot. Mechatron., Vol.18, No.5, pp. 556-563, 2006.
- [8] S. Kawatsuma, “Summary and Technical Issues on Robots for Fukushima Daiichi NPPs,” J. of the Robotics Society of Japan, Vol.36, No.7, pp. 472-477, 2018 (in Japanese).
- [9] H. Asama et al., “Special issue on robot technology for accident response and decommissioning of the Fukushima daiichi nuclear power station,” J. of the Japan Society of Mechanical Engineers, Vol.117, No.1151, pp. 647-691, 2014 (in Japanese).
- [10] J. Hirasawa and T. Kimura, “Development of stair-climbing mechanism with passive crawlers (Analysis of limitation for crawler rotation angle and test vehicle performance),” Trans. of the JSME, Vol.82, No.834, 15-00357, doi: 10.1299/transjsme.15-00357, 2016 (in Japanese).
- [11] W. Lee et al., “Rough terrain negotiable mobile platform with passively adaptive double-tracks and its application to rescue missions and EOD missions,” Proc. of ICCAS2005, pp. 1-6, 2005.
- [12] S. Suzuki et al., “Remote control system of disaster response robot with passive sub-crawlers considering falling down avoidance,” ROBOMECH J., Vol.1, 20, 2014.
- [13] J. Hirasawa and T. Kimura, “Design and Development of Stair-Climbing Robot with Passive Crawlers,” Proc. of 22nd Robotics Symposia, pp. 335-340, 2017 (in Japanese).
- [14] A. Jacoff et al., “Stepfield Pallets: Repeatable Terrain for Evaluating Robot Mobility,” Proc. of the 8th Workshop on Performance Metrics for Intelligent Systems, pp. 29-34, 2008.
- [15] Ministry of Economy, Trade and Industry, “Performance Evaluation Manual for Land-mobile Robots for Responding to Tunnel/Plant Disasters,” 2018 (in Japanese).
- [16] J. Hirasawa, “Application to the Step Field of a Stair-Climbing Robot with Passive Crawlers,” Proc. of JSME Annual Congress, S1140202, 2017 (in Japanese).
- [17] J. Hirasawa, “Application to step fields of a stair climbing mechanism,” Proc. of the 2018 JSME Conf. on Robotics and Mechatronics, No.18-2, 1P2-G01, 2018 (in Japanese).
- [18] R. Sheh et al., “Extracting Terrain Features from Range Images for Autonomous Random Stepfield Traversal,” 2007 IEEE Int. Workshop on Safety, Security and Rescue Robotics, pp. 1-6, doi: 10.1109/SSRR.2007.4381260, 2007.
- [19] Y. Hosoda et al., “‘SWAN’: a robot for nuclear disaster prevention support,” Advanced Robotics, Vol.16, No.6, pp. 485-488, 2002.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.